开源鸿蒙具身智能PMC(筹)成果入选顶会IROS!推出SOMA系统,提升VLA模型复杂场景作业稳定性
近日,2026 IEEE/RSJ 智能机器人与系统国际会议(IROS: International Conference on Intelligent Robots and Systems)公布录用结果,开源鸿蒙具身智能PMC(筹)相关研究论文成功入选。IROS 是机器人领域极具影响力的国际会议之一,本次成果聚焦视觉-语言-动作模型在复杂开放环境中的鲁棒部署问题,自研SOMA策略编排与记忆增强系统,探索通过上下文内自适应提升VLA模型在复杂机器人任务中的泛化能力。
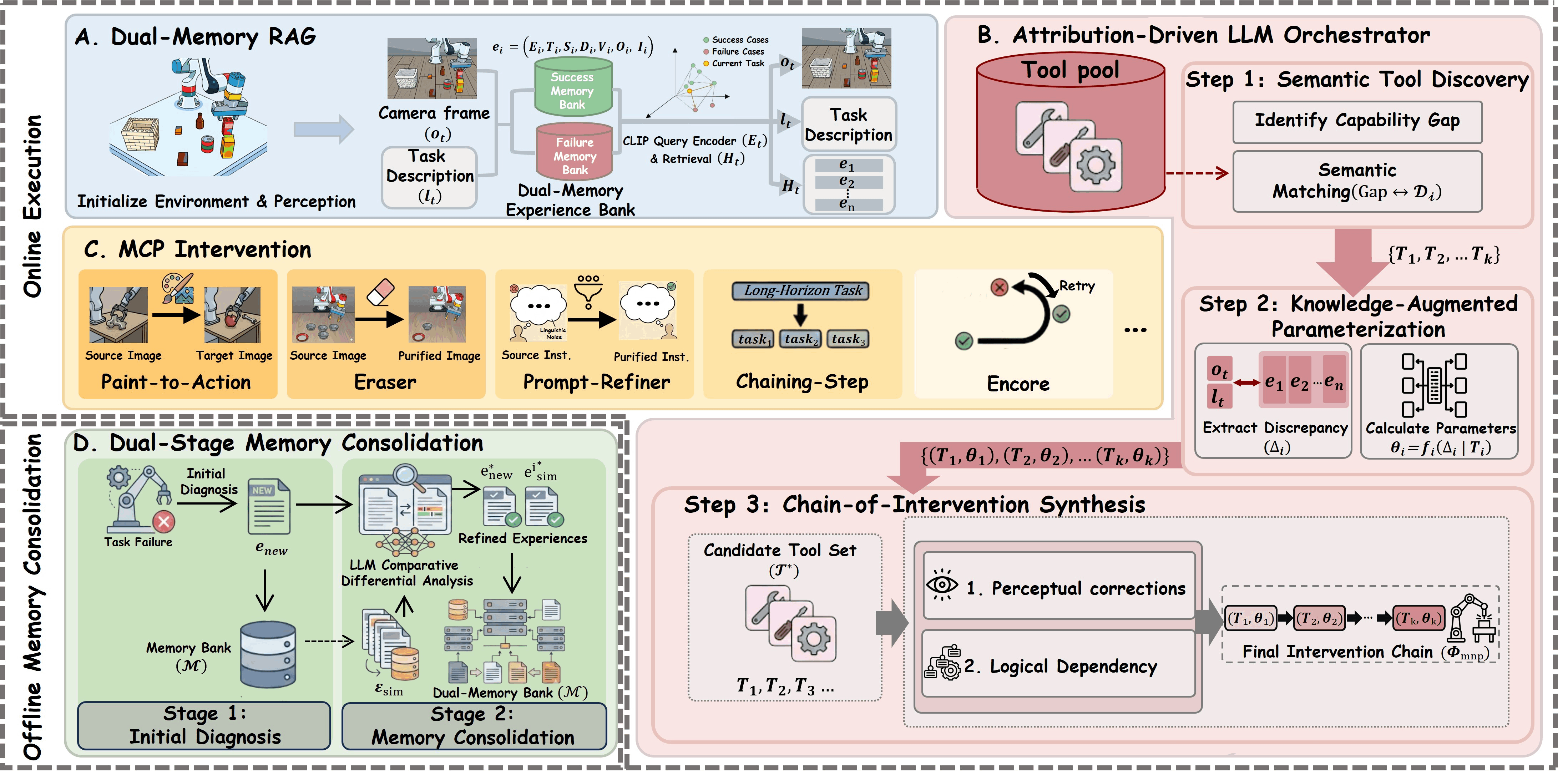
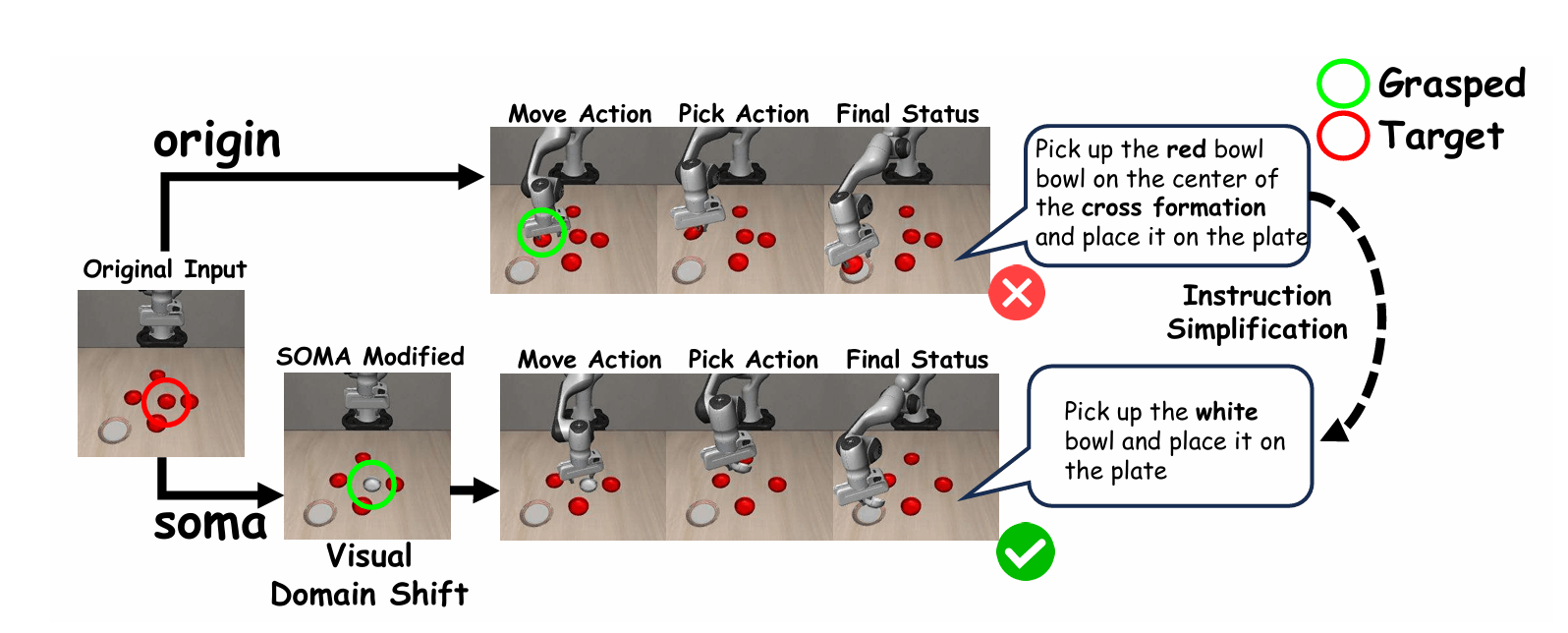
当前VLA模型是通用机器人控制的主流技术路线,但真实场景下视觉干扰、语言歧义、长程任务误差累积等问题,极易导致机器人在陌生环境任务失效,反复微调模型又会带来极高落地成本。针对该难题,SOMA 通过对比式双记忆模块存储成败轨迹,依托大模型编排器结合历史经验诊断任务故障,借助 Model Context Protocol(MCP) 动态组织工具链完成画面降噪、任务拆解、关键步骤重试等实时干预,再搭配离线记忆巩固机制持续迭代经验库,不断优化机器人执行策略。
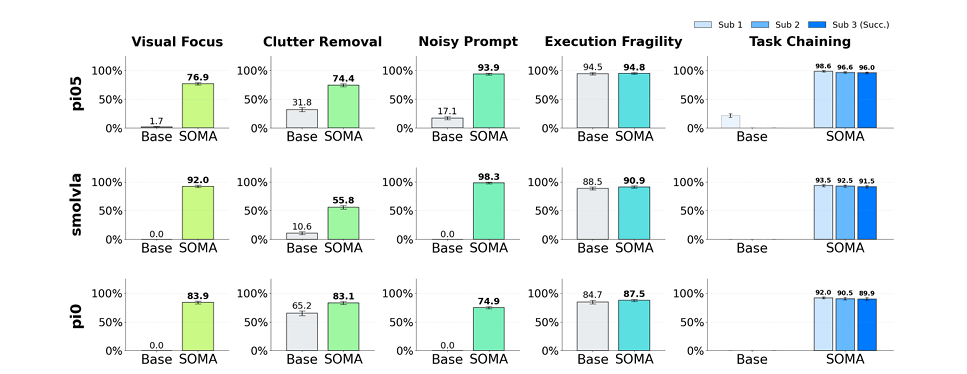
本文提出LIBERO-SOMA评测基准,对 π₀、π₀.₅ 和 SmolVLA 三种主流VLA模型开展测试,实验证明搭载SOMA后,机器人任务执行成功率平均提升59.3%,有效解决VLA 模型在真实环境部署稳定性不足的行业难题。
论文信息:Zhuoran Li, Zhiyang Li, Kaijun Zhou, Jinyu Gu. SOMA: Strategic Orchestration and Memory-Augmented System for Vision-Language-Action Model Robustness via In-Context Adaptation. IEEE/RSJ International Conference on Intelligent Robots and Systems, 2026.(成果来自于上海交通大学古金宇老师团队)

社区规范:仅讨论OpenHarmony相关问题。
更多推荐
 0
0 0
0- 0



 已为社区贡献11条内容
已为社区贡献11条内容

所有评论(0)