开源鸿蒙教育委员会(筹)师资培训暨专题讲座(上海站)圆满举办
2026年5月29日,由开源鸿蒙教育委员会(筹)举办的师资培训活动在上海交通大学闵行校区圆满落幕。本次活动由开源鸿蒙项目群技术指导委员会指导,开源鸿蒙教育委员会(筹)、开源鸿蒙具身智能 PMC(筹)联合主办,上海交通大学、上海杉达学院、青软创新科技集团股份有限公司共同承办。本次培训覆盖全国高校与职业院校近40所,面向全国相关专业教师,旨在深化开源鸿蒙社区与高校之间的协同合作、推动产教融合与科教融汇、助力国产操作系统与具身智能领域师资队伍建设。
嘉宾合影
上海交通大学并行与分布式系统研究所所长臧斌宇教授致辞。他表示,开源鸿蒙为具身智能筑牢国产操作系统底座,各方携手共建“平台+资源+服务”的人才培养体系,从机械臂实践到多智能体协同,推动教学对接产业前沿,期待大家探索产教融合新模式,培育优质创新人才。
臧斌宇致辞
开源鸿蒙项目群技术指导委员会秘书处副主任刘果介绍,开源鸿蒙是开放原子开源基金会核心项目,作为全场景智能终端操作系统,生态规模将持续壮大。社区搭建完善治理架构,深耕具身智能等前沿方向,深化产学研协同。目前已落地多项教学资源与校园社团,常态化开展各类技术活动,稳步推进技术与人才生态建设。
刘果进行分享
上海交通大学计算机学院助理教授李阳围绕具身智能前沿技术作专题分享。重点介绍了人格驱动的持续自主具身智能体(PEPA),以人格作为目标生成机制,通过记忆反思实现无指令自主决策,在真实机器人上完成电梯、充电、导航等长期自主任务。
李阳进行分享
上海交通大学计算机学院博士后郅朋指出,具身智能正从技术热点走向产业爆发,操作系统迎来具身时代新机遇。他指出,当前具身智能面临推理效率低、成本高、可靠性不足、协同碎片化四大挑战,并提出通过硬件与操作系统协同、端云算力调度、仿真数据优化、异构实时调度、R2X泛在协同等路径突破瓶颈。

郅朋进行分享
青软集团具身智能与生态总部解决方案王鹏飞介绍,青软集团依托开源鸿蒙分布式架构,打造“具身智能+鸿蒙AI”一体化人才培养体系,通过课程资源、实验实训设备、智慧教学平台,为高校提供国产化、软硬融合的人才培养解决方案,助力培养适配具身智能与鸿蒙生态的复合型技术人才。

王鹏飞进行分享
上海交通大学臧斌宇教授围绕“开源鸿蒙+具身智能核心课程体系大纲”作专题讲解。他从高校人才培养体系建设出发,介绍了面向具身智能方向的课程设计思路,提出应以开源鸿蒙操作系统为底座,围绕具身智能基础认知、模块化工程能力、VLA 与具身智能实践、项目集成与行业场景实战等层次,构建循序渐进的课程体系。该体系强调将操作系统基础、智能体开发、机器人操作系统应用、机械臂控制、视觉感知、数据采集、模型训练与推理等内容贯通起来,形成从理论学习、工程训练到综合项目实践的完整培养路径,为高校开展“开源鸿蒙+具身智能”课程建设提供了系统化参考。
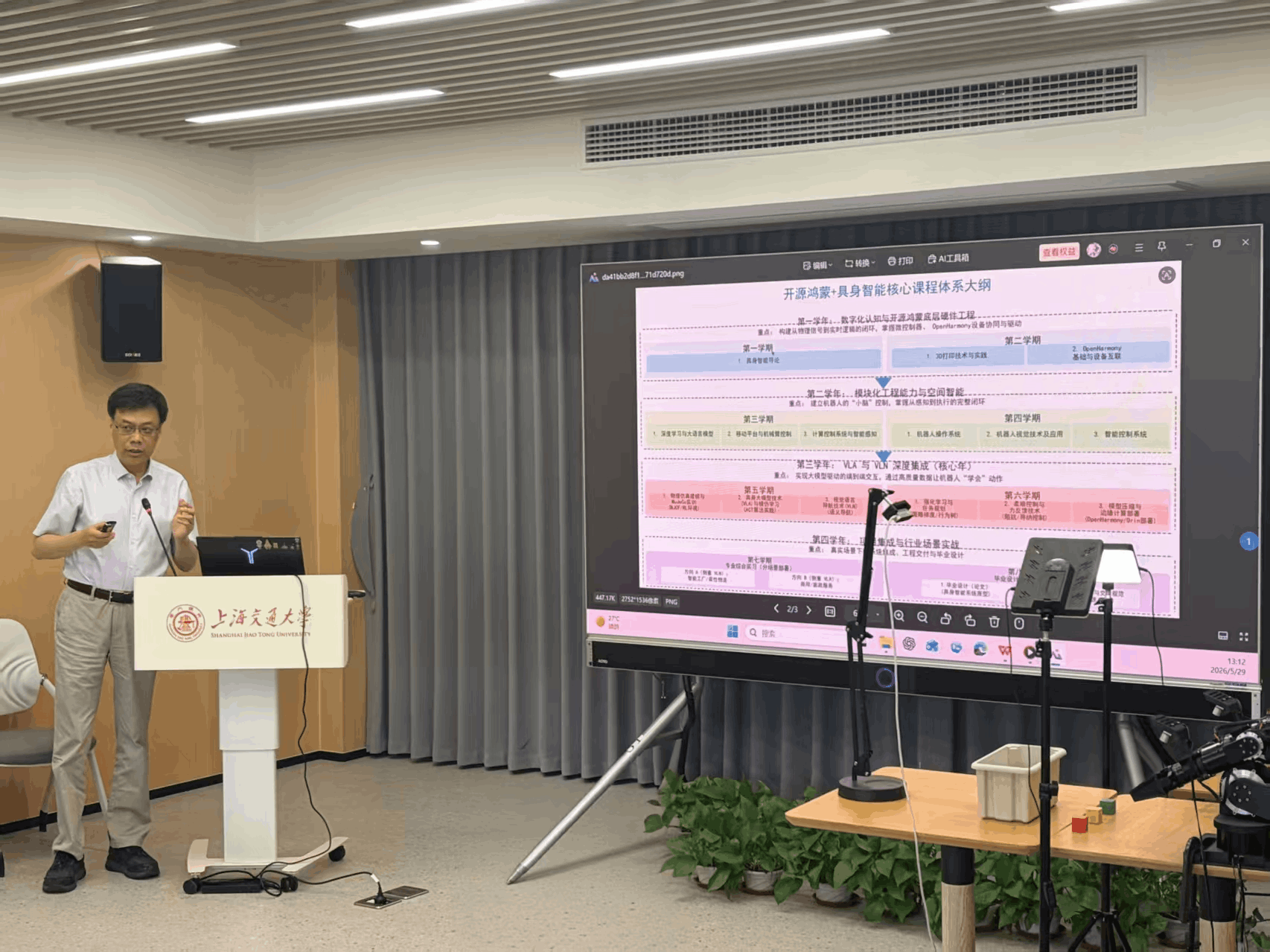
臧斌宇进行分享
上海杉达学院祝欣蓉副教授围绕 OpenClaw(龙虾AI)赋能“开源鸿蒙+具身智能”课程建设作分享。她结合培训中提出的课程体系思路,指出高校在建设相关课程时,应从课程目标、知识模块、实践项目和能力产出等方面进行整体设计,将开源鸿蒙操作系统基础、智能体开发、Skill 定制、设备协同、机械臂实践和虚拟仿真项目有机衔接。基于 OpenClaw 平台,教师可通过 Markdown 开发与无代码配置,快速生成适配本校专业方向的课程方案、实训任务和个性化 Skill 资源,降低智能体教学与实践项目建设门槛,推动开源鸿蒙与具身智能教学资源的共建共享。
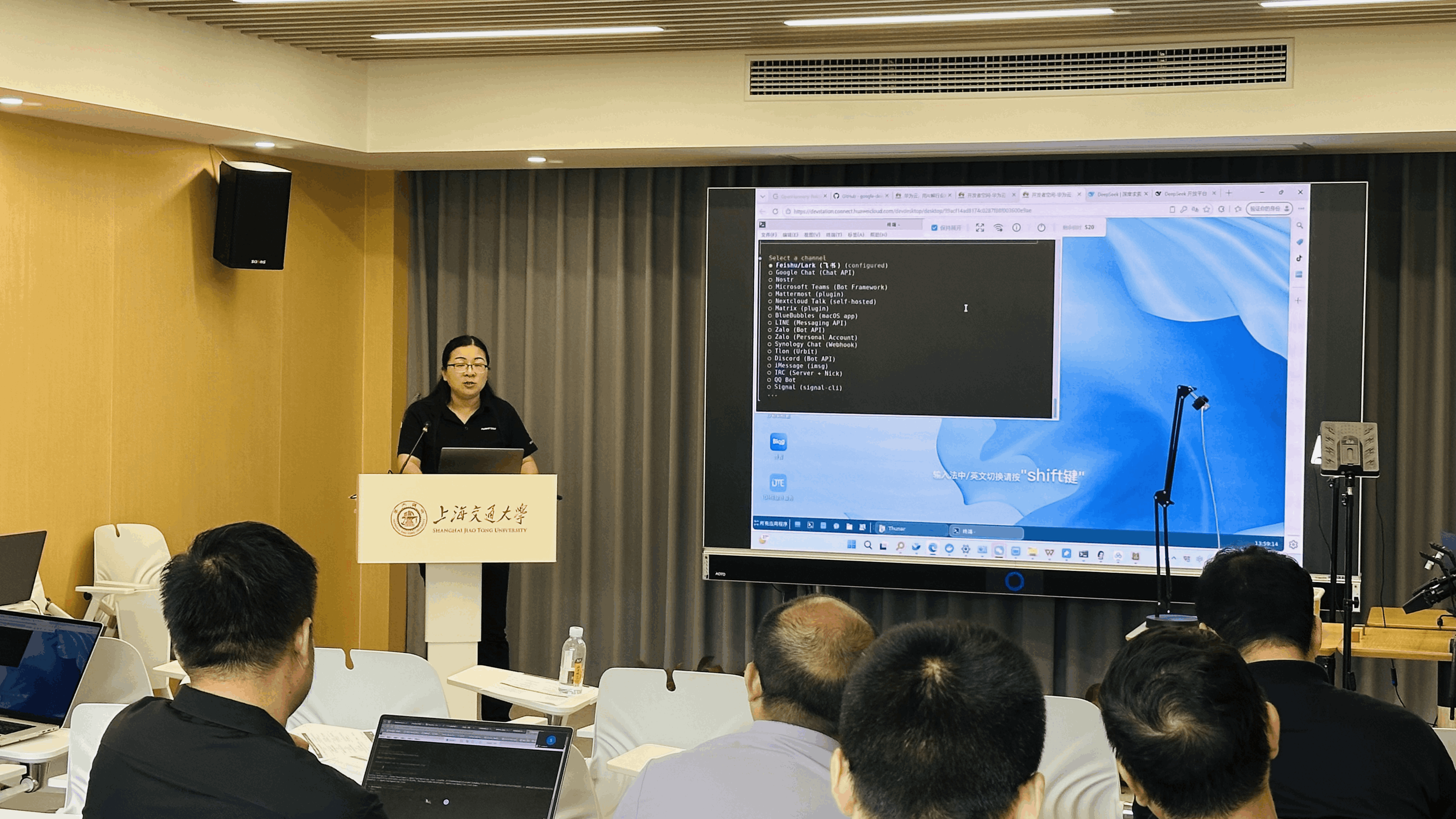
祝欣蓉进行分享
臧子凝介绍了上海交大XLRobo-UE系列具身智能机械臂。该平台支持定制化,搭载主从双臂、夹爪与三摄像头,采用分布式C-S架构与ROS2通信,实现低延时控制。数据采集兼容LeRobot格式,支持ACT、π0等模仿学习策略,通过异步推理引擎保障高频控制。同时具备完善的安全机制,任务成功率超90%。
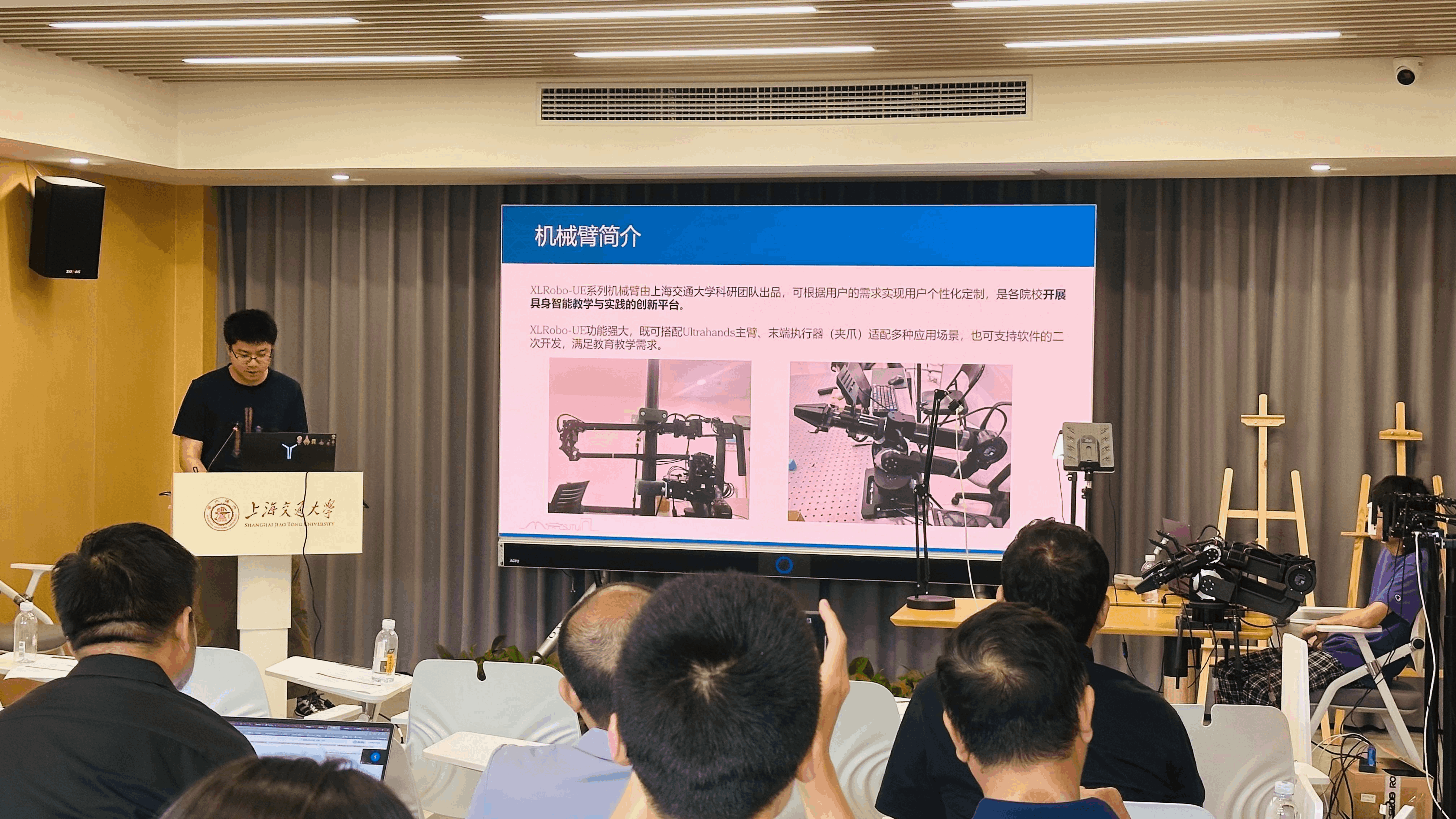
臧子凝进行分享
此次培训采取“专题讲授+实践教学”的混合方式,通过课堂观摩、技能训练、研讨展示,覆盖OpenClaw + OHEdu核心技能:基于标准开发套件,采用OpenClaw框架进行智能体设计、Skill定制、工具调用、记忆管理等开发,及设备协同、环境感知、任务编排等全栈能力。注重案例与教学创新,帮助教师夯实基本功、提升教学素养,将开源与智能体技术融入课程。

教师结业证书展示
本次培训会的成功举办,为高校与生态伙伴搭建了高效交流与能力提升的平台,有力推动开源鸿蒙具身智能教育落地,促进产教深度融合。未来,开源鸿蒙教育委员会(筹)将持续联合各方力量,深化师资培养、教学资源共建与生态协同,加快培育适配国产操作系统与具身智能产业的高素质人才,为开源鸿蒙生态高质量发展注入持久动力。

社区规范:仅讨论OpenHarmony相关问题。
更多推荐
 0
0 0
0- 0



 已为社区贡献11条内容
已为社区贡献11条内容

所有评论(0)