《一文搞定:Windows 下 Docker 编译 OpenHarmony 及小凌派 - RK2206烧录开发》《Windows+Docker+小凌派 - RK2206车载测距上云》
在小凌派-RK2206开发板上,长按MaskRom按键(详见板子的按钮,MaskRom按键不要松开),点击ReSet按键(详见板子的按钮,按下后松开,但MaskRom按键不要松开,大约5秒后松开),烧写工具出现:“发现一个MASKROM设备”。弹出打开对话框,选择主目录下 out/rk2206/lockzhiner-rk2206/images,选中 rk2206_db_loader.bin文件。在
Windows环境docker编译方法
1、环境准备
1.1、下载工具
1.1.1、下载并安装烧写工具(代码烧录工具)
下载网址(百度云):https://pan.baidu.com/s/1SU99yvtPehkRzBKH2jzNtA
提取码:1adc
1.1.2、下载并安装USB驱动和CH340驱动
USB驱动下载网址(百度云):https://pan.baidu.com/s/1s_zEuDU_OpcltaJUZNvbLA
提取码:9slw
CH340驱动下载:https://www.wch.cn/downloads/CH341SER_EXE.html
1.1.3、下载并安装VSCode
下载网址(百度云):https://pan.baidu.com/s/1gi5froBzuSjLjvV4syKQ0A
提取码:iv3k
1.1.4、下载并安装Docker Desktop
官网网址:https://www.docker.com/products/docker-desktop/
1.2、部署环境
1.2.1、Windows开启Linux虚拟机平台
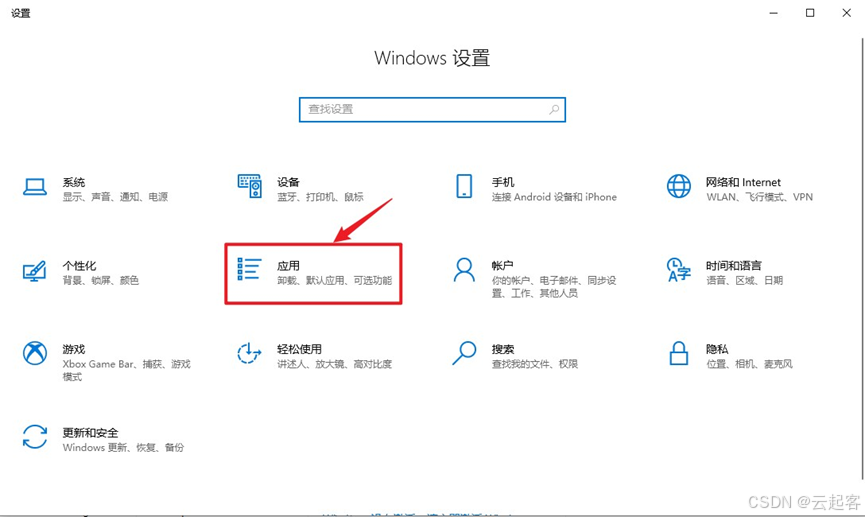
点击“开始” => 系统设置" => "应用" ,具体如下所示:
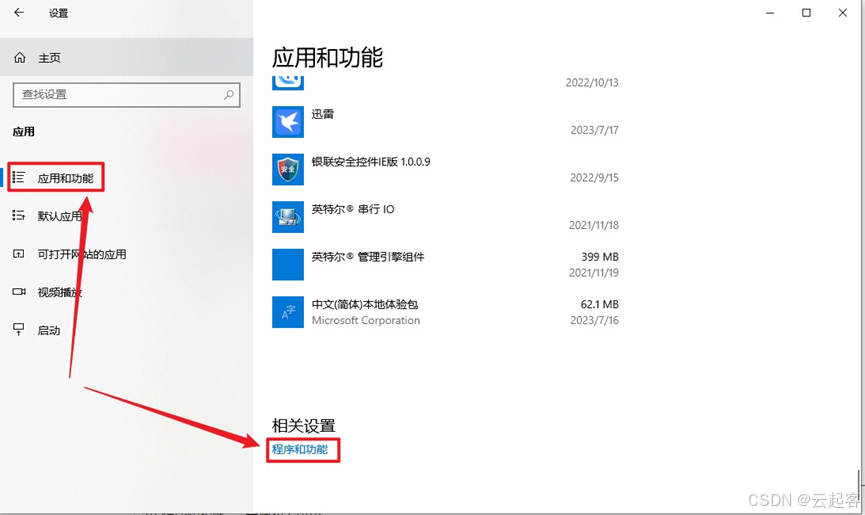
选择"应用和功能" => "程序和功能" ,具体如下所示:
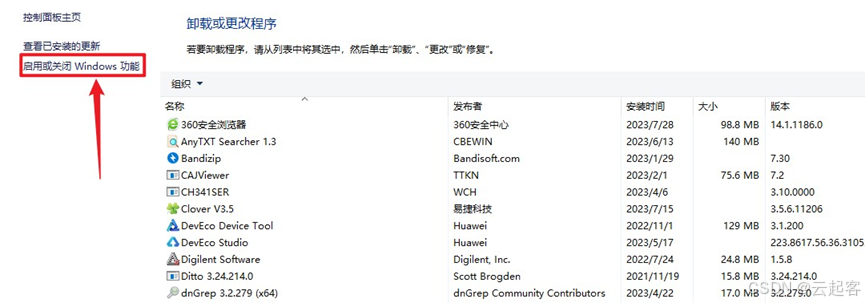
点击 “启用或关闭Windows功能”,具体如下所示:
勾选“Hyper-V”选项,具体如下所示:
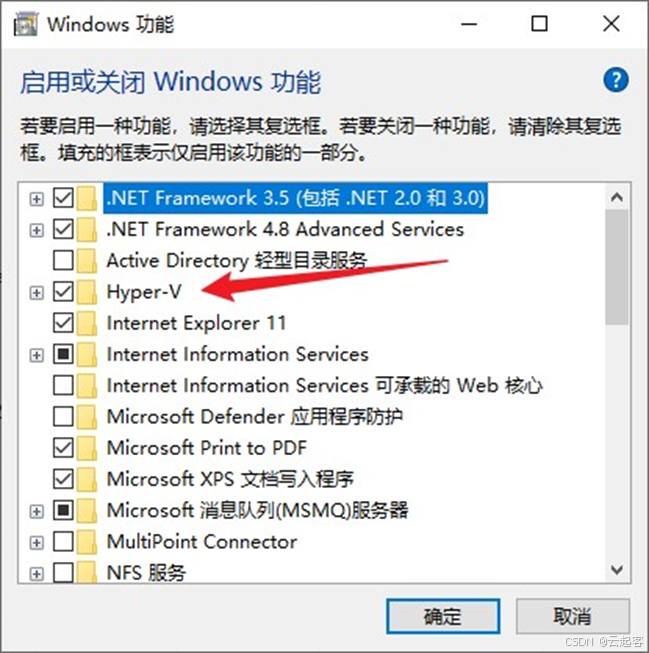
勾选“适用于Linux的Windows子系统”和“虚拟机平台”选项,具体如下所示:
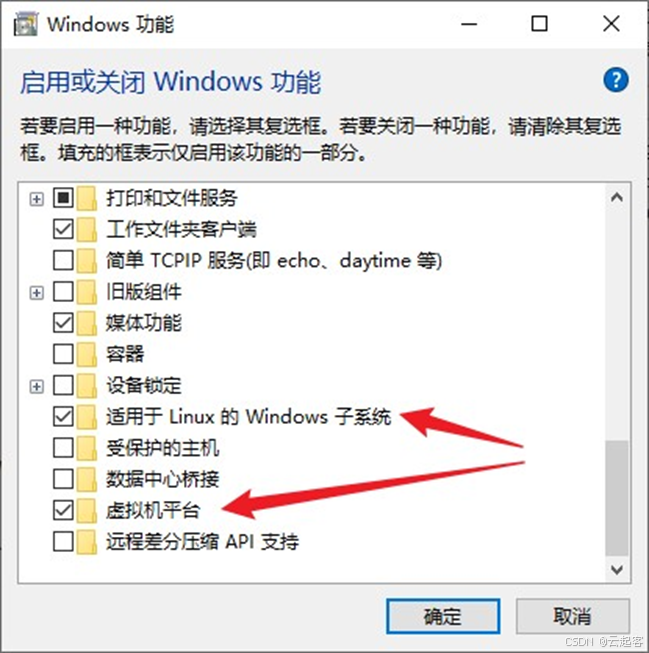
点击“确定”,重启Windows。
1.2.2、Windows安装WSL2
打开Power Shell,输入如下命令:
wsl --install
1.2.3、docker配置PATH环境变量
将docker相关命令路径配置到PATH环境变量中。
docker安装路径一般是:C:\Program Files\Docker\Docker\resources\bin
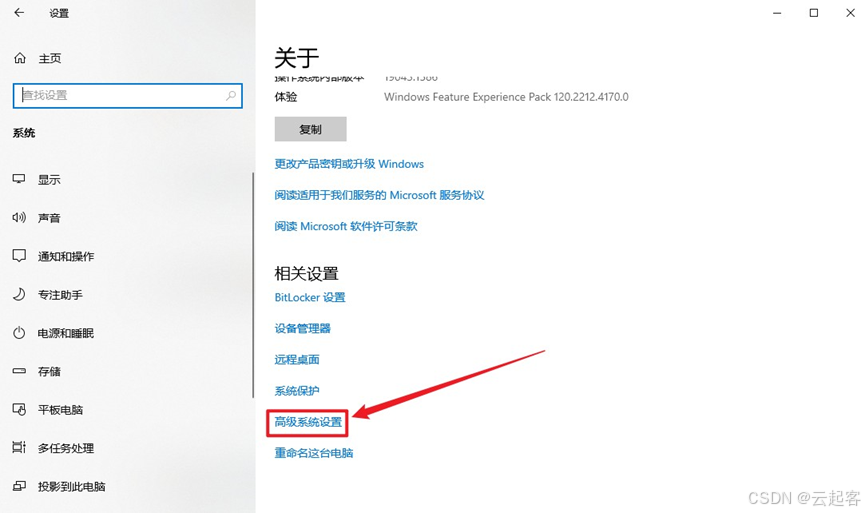
右击“我的电脑” => "属性" => “关于” => "高级系统设置",具体如下所示:
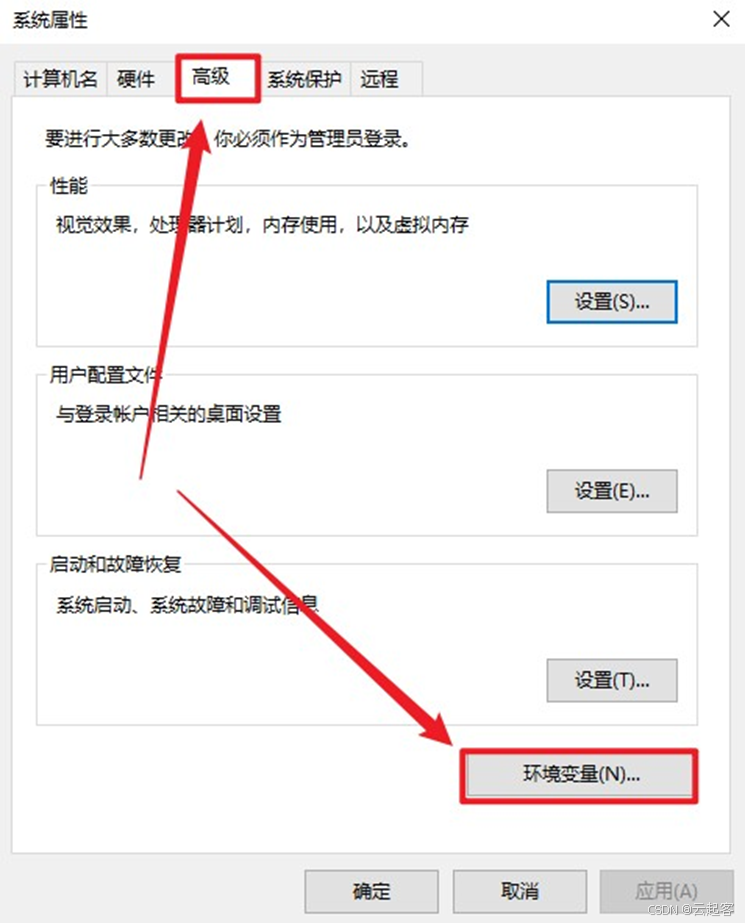
点击“高级” => "环境变量",具体如下所示:
选中“Path”,点击“编辑”按钮,具体如下所示:
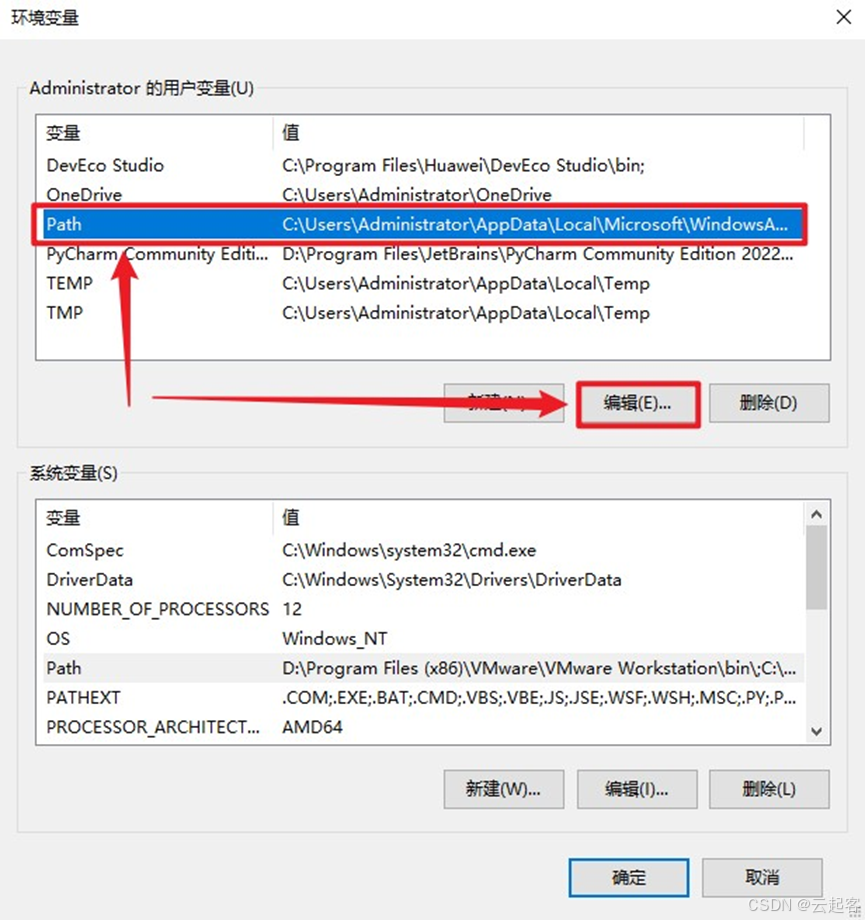
点击“新建”按钮,将docker可执行程序目录放入,具体如下所示:
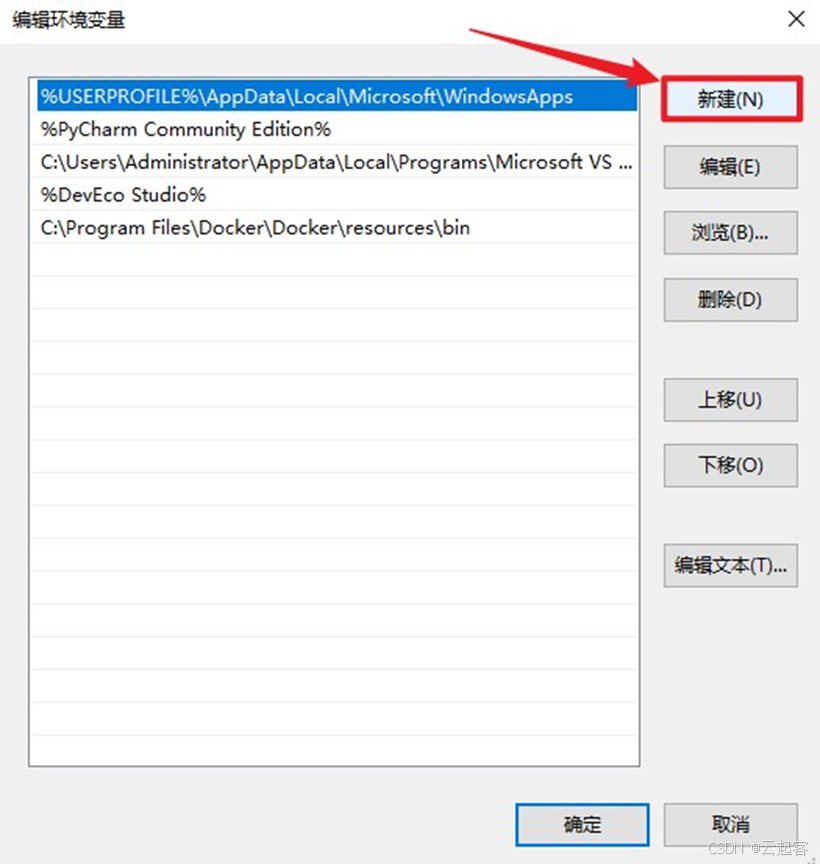
点击“确定”,Windows重启。
1.3、准备工作
1.3.1、获取Gitee代码
请到官网下载最新代码。
官网网址:小凌派-RK2206开发板: 小凌派-RK2206开发板鸿蒙3.0稳定版资料共享
1.4、docker编译
打开Power Shell命令窗口,执行如下命令。
1.4.1、下载镜像
docker pull swr.cn-south-1.myhuaweicloud.com/openharmony-docker/openharmony-docker:1.0.0
1.4.2、开启容器
移动到OpenHarmony主目录下(这里假设OpenHarmony主目录为G:\git\lockzhiner-rk2206-openharmony3.0lts-master),运行如下命令:
docker run -it -v G:\git\lockzhiner-rk2206-openharmony3.0lts-master:/home/openharmony swr.cn-south-1.myhuaweicloud.com/openharmony-docker/openharmony-docker:1.0.0
注意:上述“:”的前面字符串是本地OpenHarmony源代码主目录,需要根据OpenHarmony源代码主目录路径而改变。“:”后面为docker镜像的路径,不需要修改。
接下来,安装相关工具
# 移动到容器内OpenHarmony主目录,注意容器中主目录变为/home/openharmony
cd /home/openharmony
# 下载编译工具
./build/prebuilts_download.sh
# 安装hb工具
pip3 install build/lite
最后,编译OpenHarmony
hb set -root .
hb set
lockzhiner
lockzhiner-rk2206
选择lockzhiner-rk2206
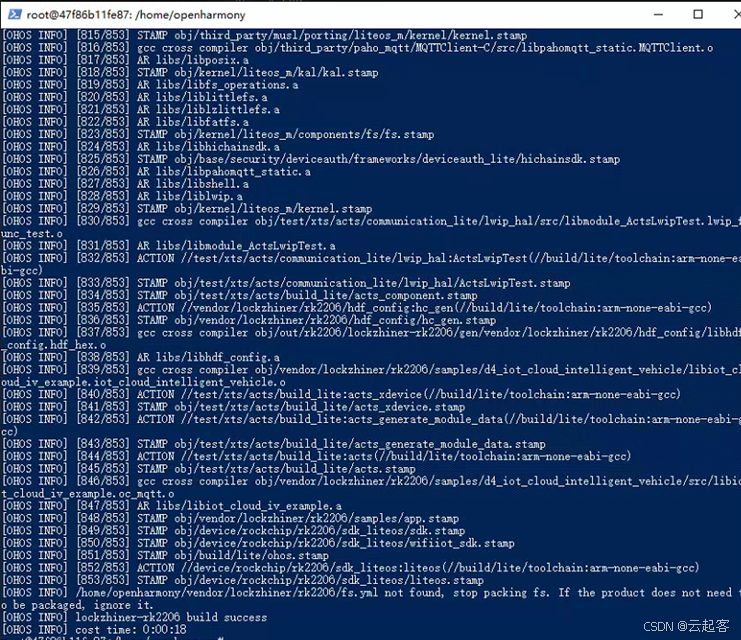
hb build -f
编译出的目标文件在 out/rk2206/lockzhiner-rk2206/images目录下。
2、烧录打印
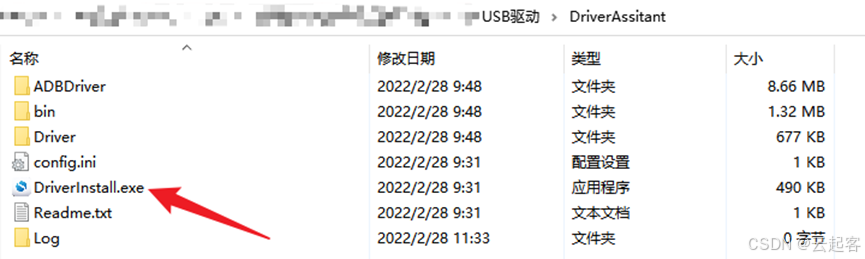
2.1、安装USB驱动
打开USB驱动目录,点击DriverInstall.exe,如下图所示:
点击 运行,如下图所示:
点击 驱动安装,如下图所示:
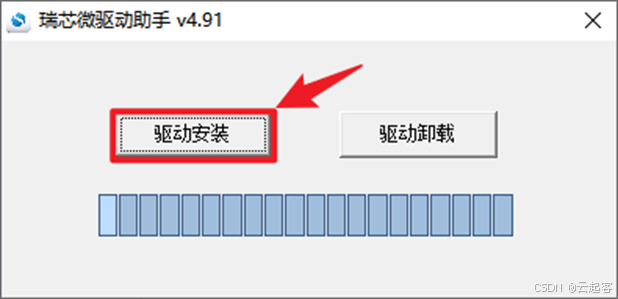
安装完成后退出。
2.2、烧写程序
2.2.1、打开RKDevTool
打开烧写工具RKDevTool,点击RKDevTool.exe。如下图所示:
点击运行,如下图所示:
2.2.2、指定烧写文件
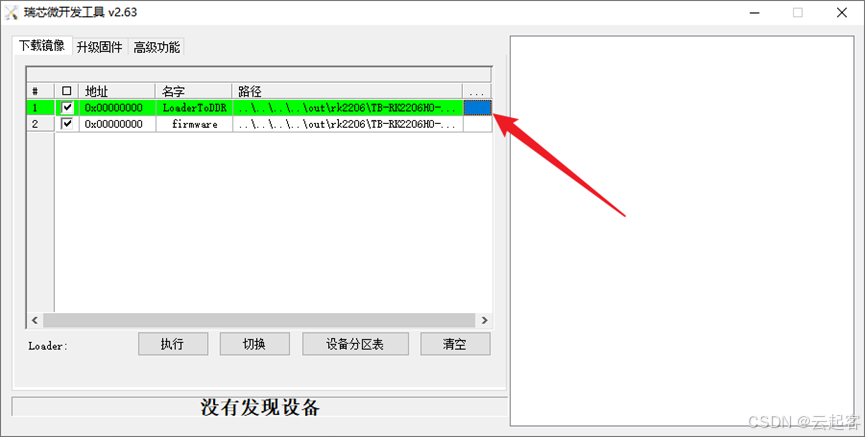
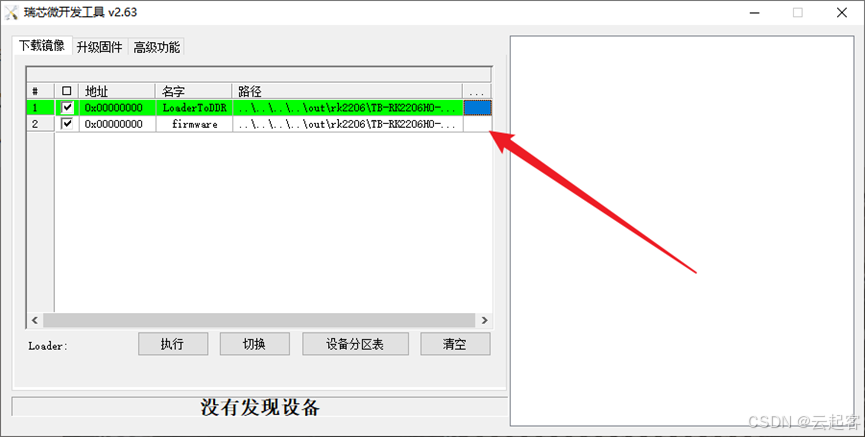
(1)指定LoaderToDDR文件
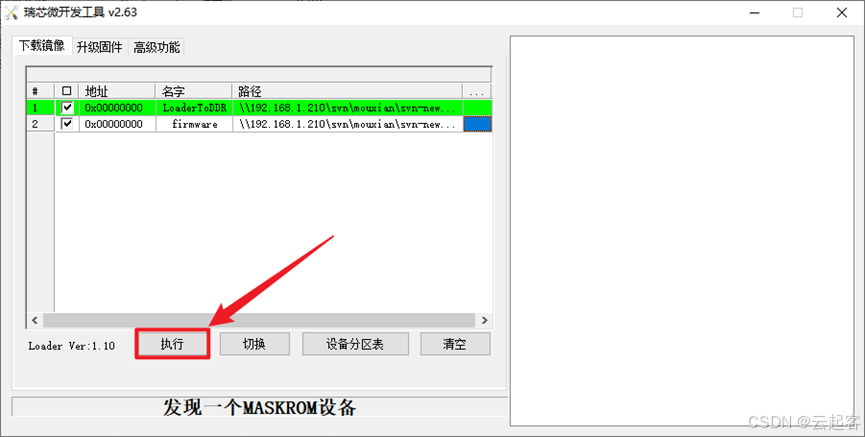
点击红色箭头所指地方,如下图所示:
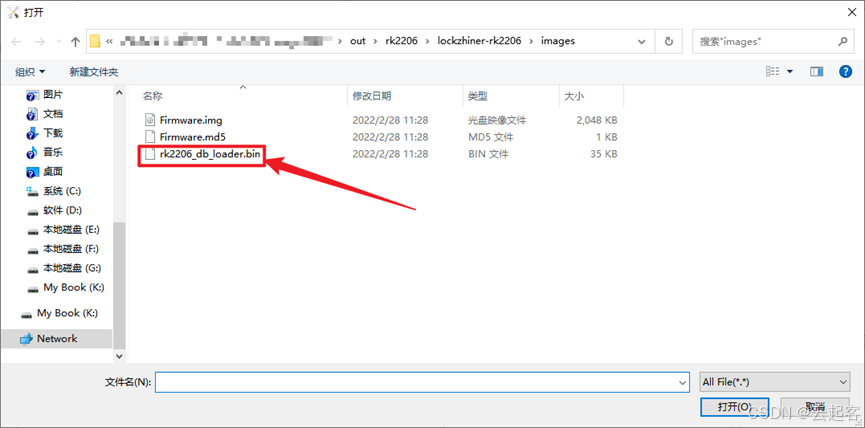
弹出打开对话框,选择主目录下 out/rk2206/lockzhiner-rk2206/images,选中 rk2206_db_loader.bin文件。如下图所示:
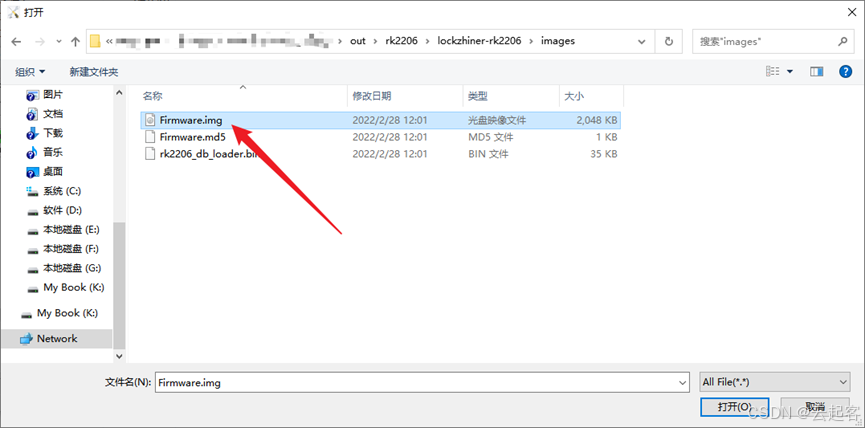
(2)指定fireware文件
(注意箭头所指第2列)点击红色箭头所指地方,如下图所示:
弹出打开对话框,选择主目录下 out/rk2206/lockzhiner-rk2206/images,选中 Firmware.img文件。如下图所示:
2.2.3、开始烧写
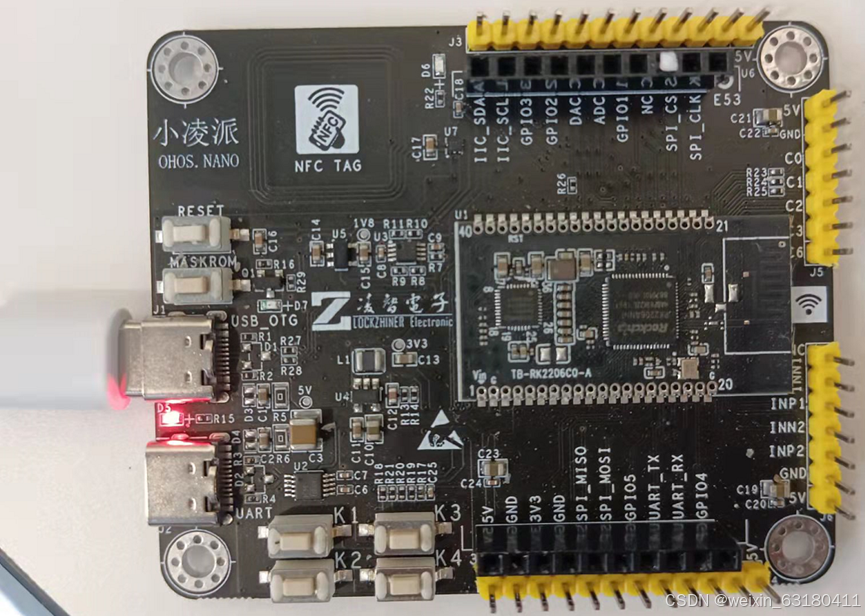
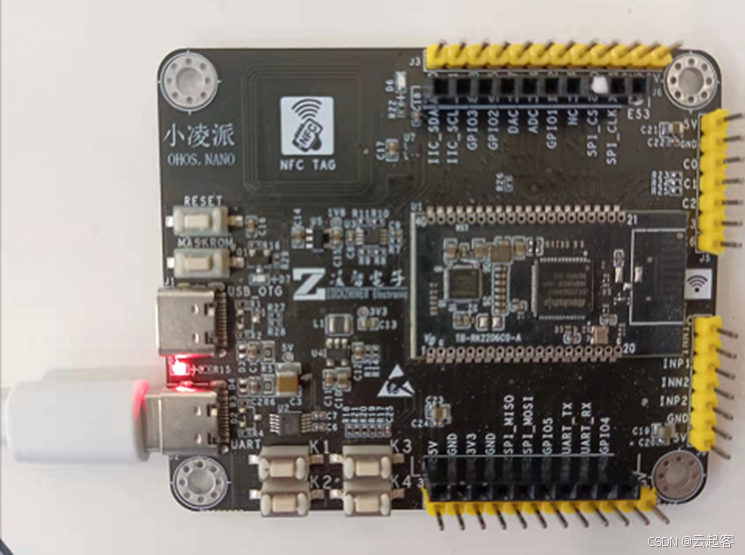
使用USB线,连接小凌派-RK2206开发板的USB-OTG(即烧录口)。如下图所示:
在小凌派-RK2206开发板上,长按MaskRom按键(详见板子的按钮,MaskRom按键不要松开),点击ReSet按键(详见板子的按钮,按下后松开,但MaskRom按键不要松开,大约5秒后松开),烧写工具出现:“发现一个MASKROM设备”。如下图所示:
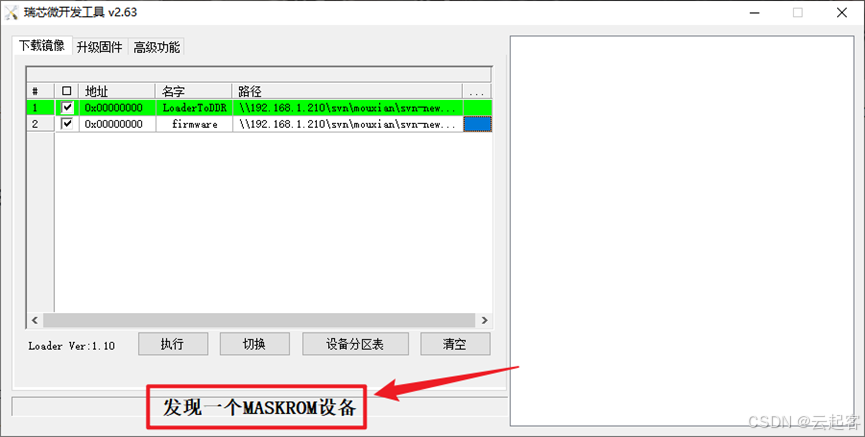
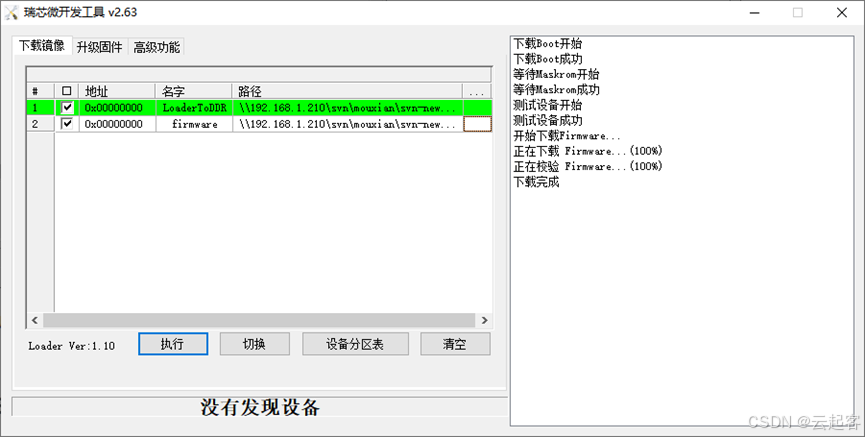
点击 执行,下载程序。如下图所示:
下载完成,如下图所示:
2.3、查看打印信息
2.3.1、USB线连接设备调试串口
将USB线连接到小凌派-RK2206开发板的UART(即调试串口)。如下图所示:
2.3.2、Windows查看串口号
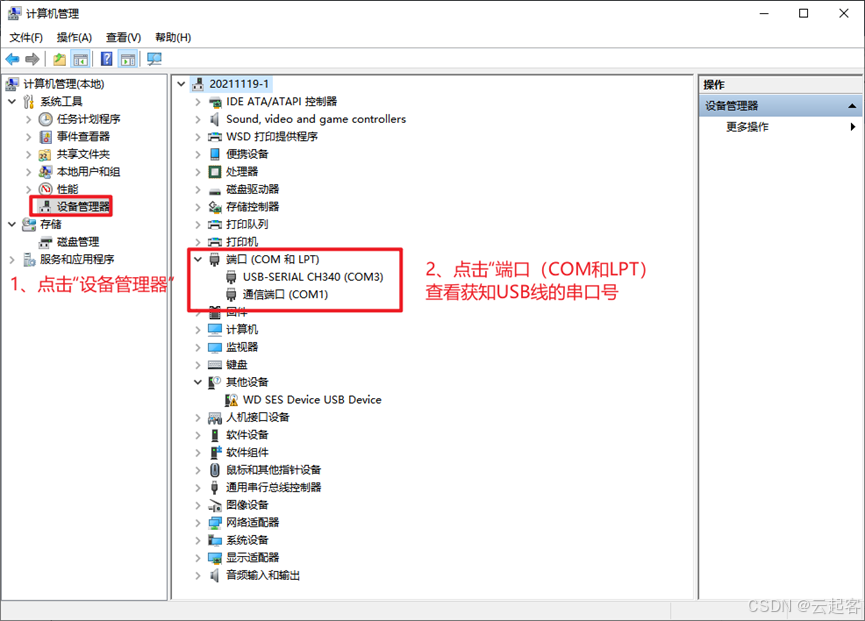
在Windows上点击 我的电脑,右击选中 管理,打开计算机管理对话框。如下所示:
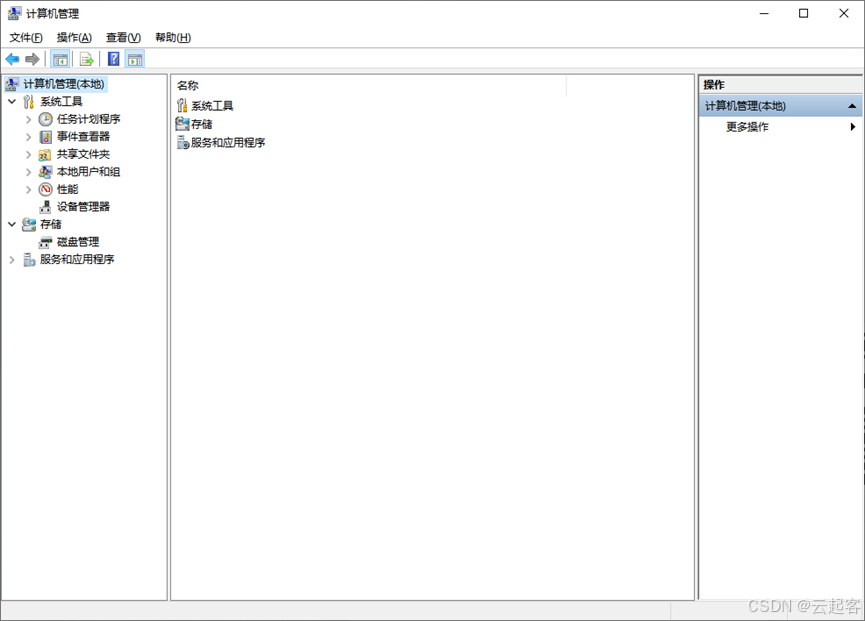
在计算机管理对话框中,点击 设备管理器,点击 端口(COM和LPT),查看获知COM3是USB串口线。
2.3.3、查看串口调试信息
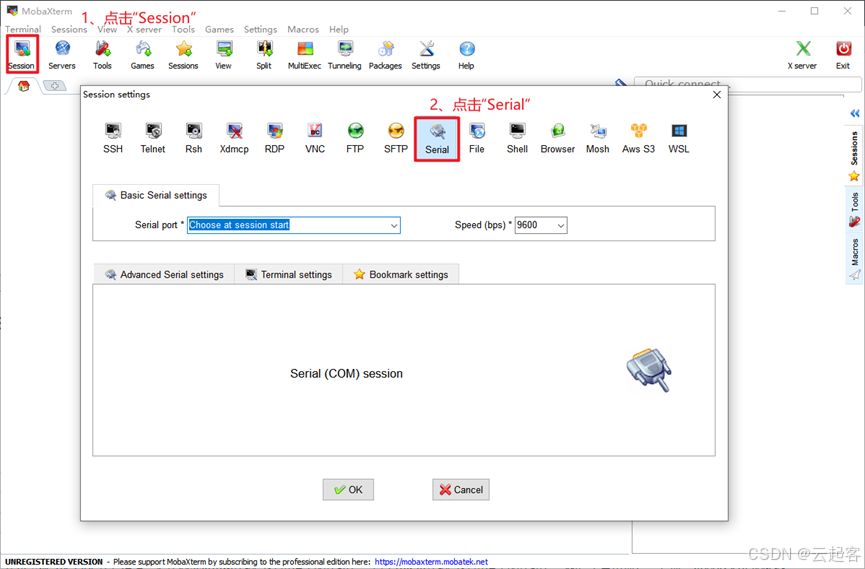
打开MobaXterm软件,点击 Session,再点击 Serial。如下图所示:
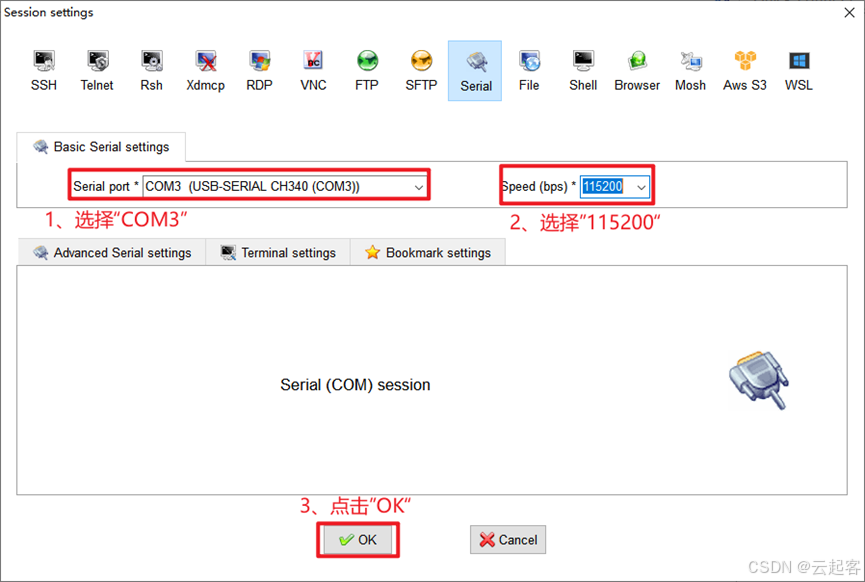
在 Serial Port中选择 COM3(即在8.3.2中查看的串口号),在 Speed中选择 115200,最后点击 OK。如下图所示:
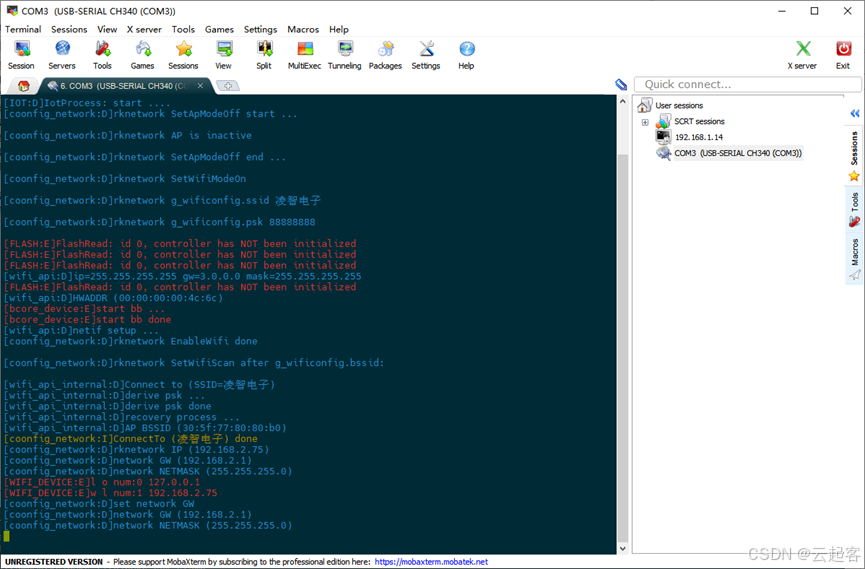
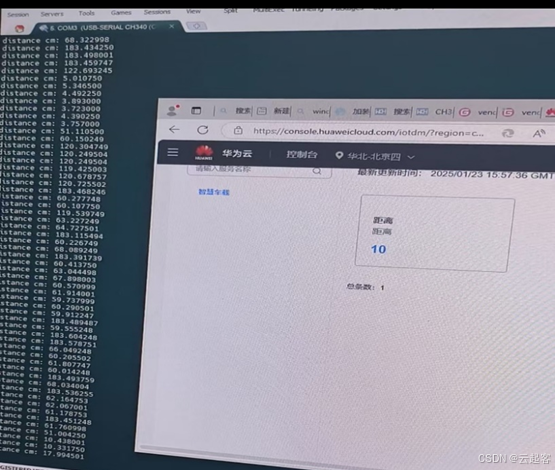
按下小凌派-RK2206开发板的RESET按键,可以查看到如下打印信息:
3、智慧车载超声波测距及数据上云代码分析
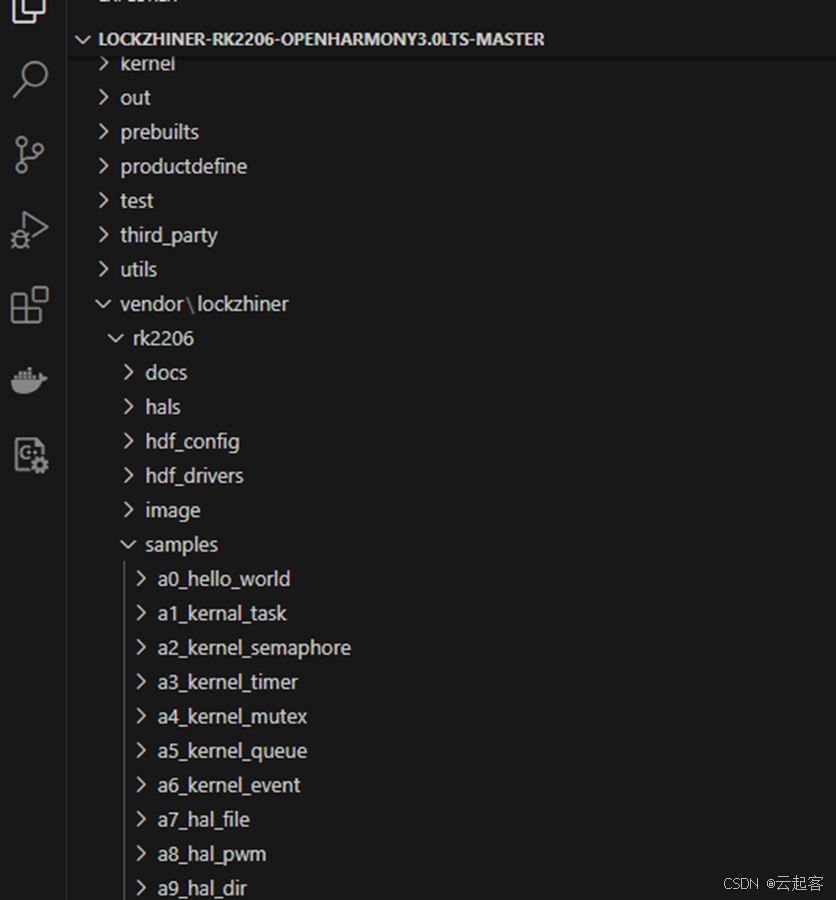
3.1、用VSCode打开代码文件夹学习例程
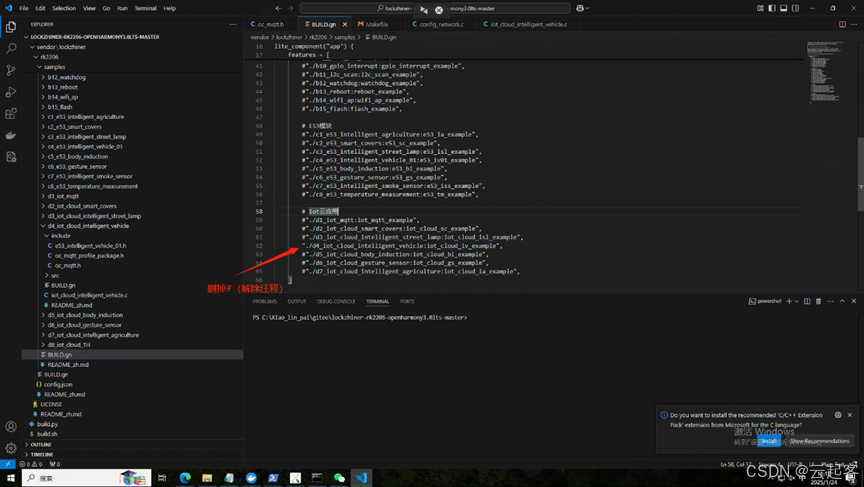
如下图,gitee\lockzhiner-rk2206-openharmony3.0lts-master\vendor\lockzhiner\rk2206\samples,(官方gitee代码)此文件夹下对 应着所有示例代码,以下我们将以d4_iot_cloud_intelligent_vehicle(智慧车载)为案例进行讲解。
3.2、例程使用
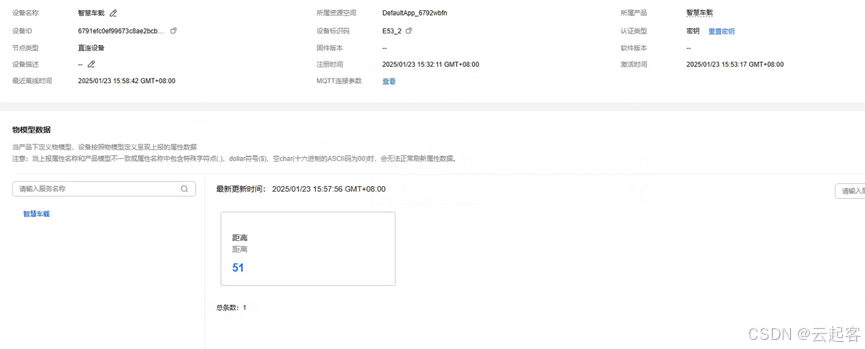
3.2.1、创建华为云产品
登录华为云:设备管理_IoT物联网平台-华为云
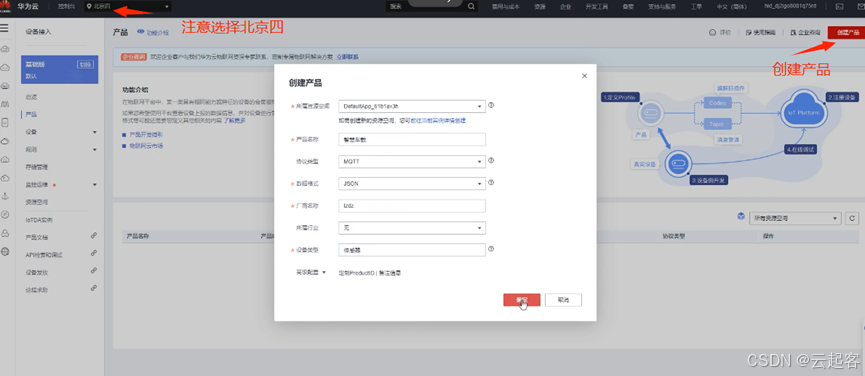

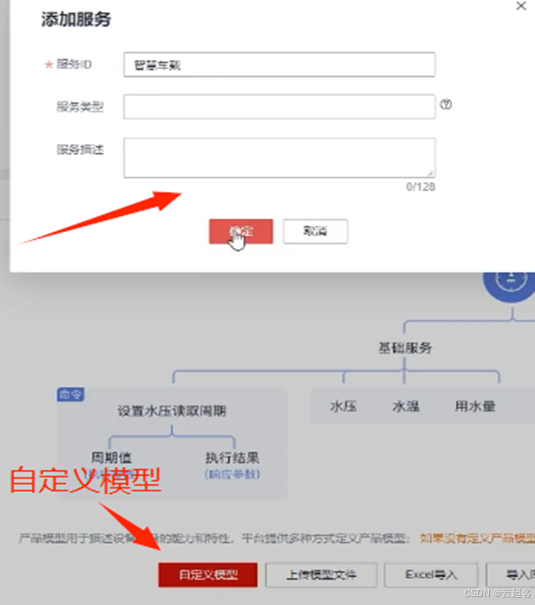

按以下信息填入
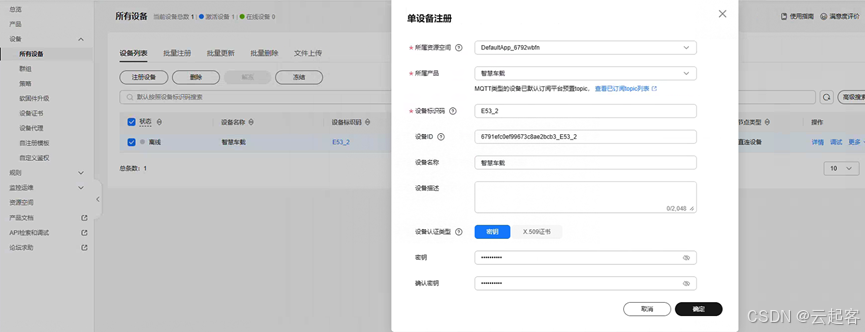
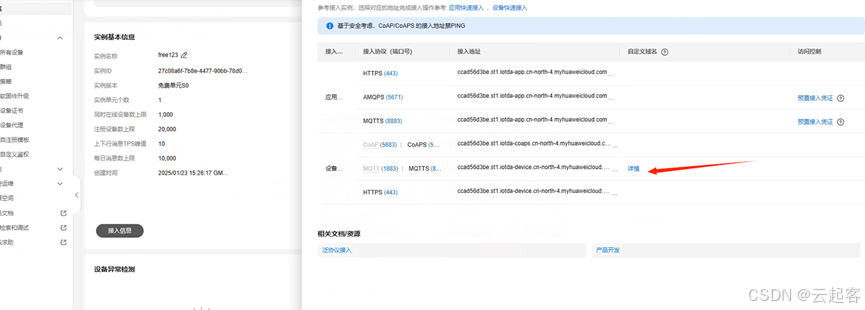
3.2.2、设备接入华为云平台
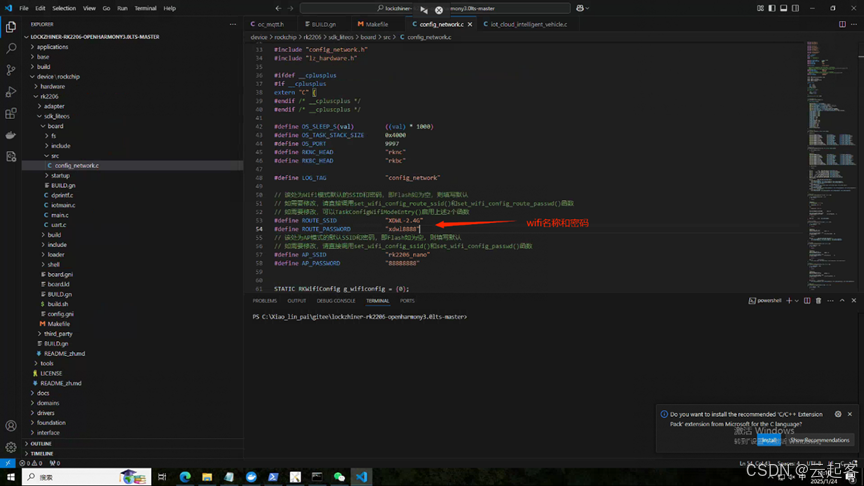
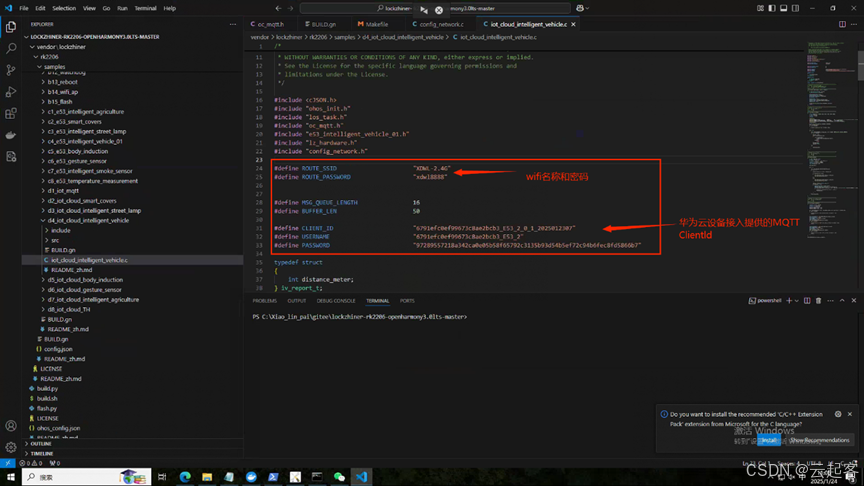
修改WiFi名称和密码
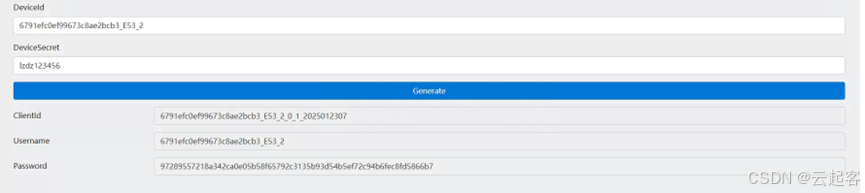
用设备ID和密匙(设备注册时填的)获取华为云设备接入提供的MQTT ClientId
查询网址链接:https://iot-tool.obs-website.cn-north-4.myhuaweicloud.com/

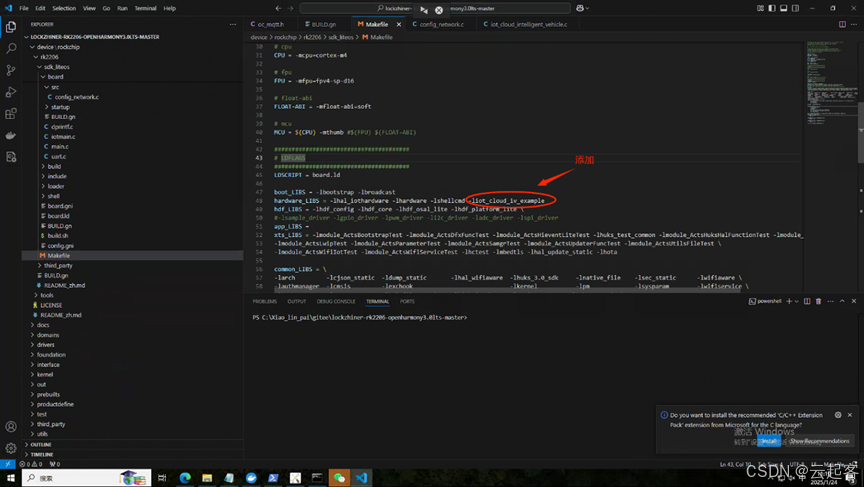
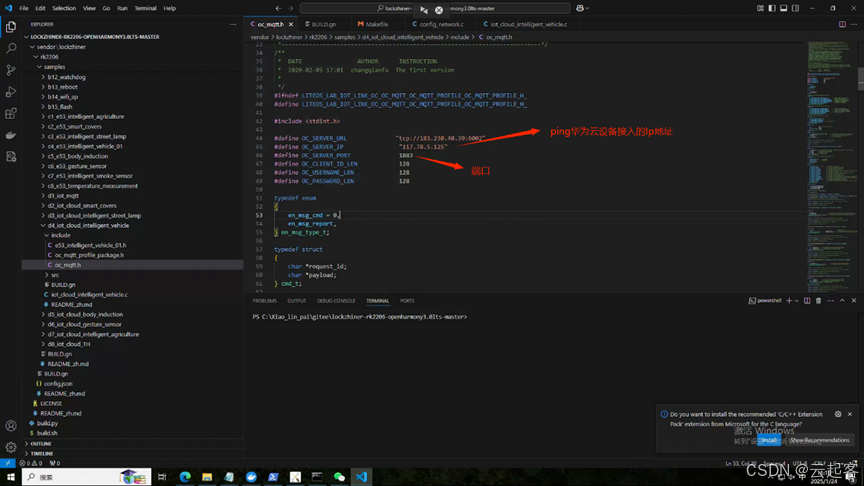
修改代码
打开命令提示符终端Ping华为云设备接入IP地址
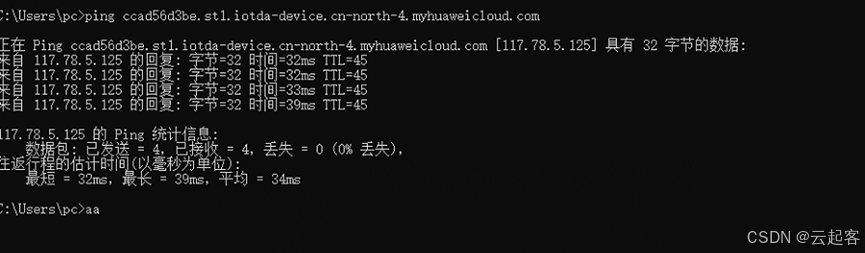
WIN + R键打开PC命令行CMD,执行如下命令获取接入域名的IP地址。
ping a161b173a6.iot-mqtts.cn-north-4.myhuaweicloud.com 通过ping命令可以查询到接入域名的IP地址为117.78.5.125 IP地址对应例程代码中的OC_SERVER_IP,端口号1883对于例程代码中的OC_SERVER_PORT。
#define OC_SERVER_IP "117.78.5.125"
#define OC_SERVER_PORT “1883”
3.3、结果展示和相关附件
注意在Power Shell界面用hb build -f编译文件
官方视频讲解链接:d3_OpenHarmony 华为云IoT应用开发-智慧车载_哔哩哔哩_bilibili
官方例程手册:vendor/lockzhiner/rk2206/README_zh.md · 凌智电子/小凌派-RK2206开发板 - Gitee.com

社区规范:仅讨论OpenHarmony相关问题。
更多推荐
 20
20 0
0- 0



 已为社区贡献1条内容
已为社区贡献1条内容

所有评论(0)