鱼香ros一键安装&全
本文介绍了一键安装ROS的便捷方法,通过执行wget http://fishros.com/install -O fishros && . fishros命令即可完成安装。推荐安装顺序:先换源(选项5),再安装ROS(选项1),更新rosdep(选项3),最后更新环境(选项4)。安装完成后可通过运行小乌龟程序rosrun turtlesim turtlesim_node测试。文末还
·
博主不想每次都去搜索,索性写下来方便复制
这是一行关键代码,可以下载ros,换源以及下载微信之类的常用软件:
wget http://fishros.com/install -O fishros && . fishros直接打开终端复制粘贴即可,前提是联网
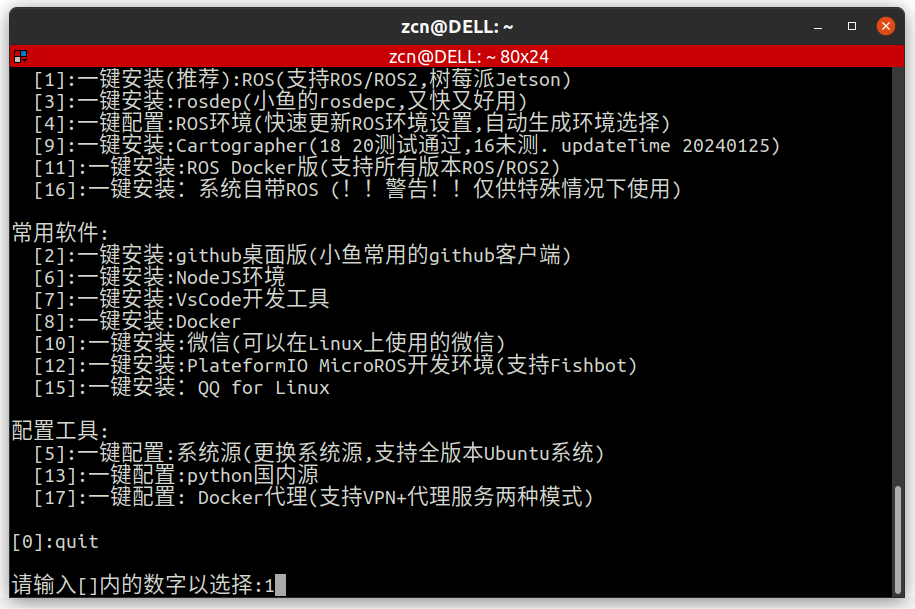
在最后一行输入对应数字即可自动安装,推荐顺序:
先输入5,更换系统源,更换系统源并删除旧源
再输入1,ROS安装,Ubuntu16.04--安装kinetic,Ubuntu18.04--安装melodic,
Ubuntu20.04--安装Noetic,Ubuntu22.04--安装ros2
再输入3,rosdep更新,安装rosdepc,避免被墙。进行sudo rosdepc init,rosdepc update
再输入4,更新ROS环境设置
最后新开终端,运行小乌龟检测是否安装成功:
roscore #输入后新开一个终端输入下面命令rosrun turtlesim turtlesim_node #输入后新开一个终端输入下面命令
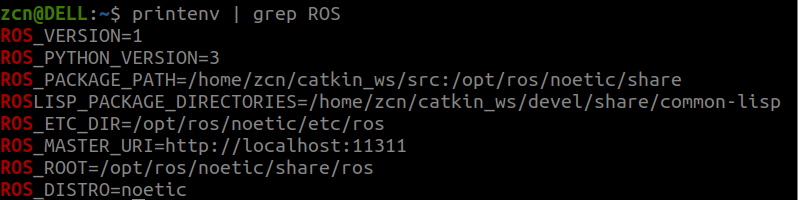
检测ROS环境:
printenv | grep ROS
以上即运用鱼香ros一键安装全部内容~
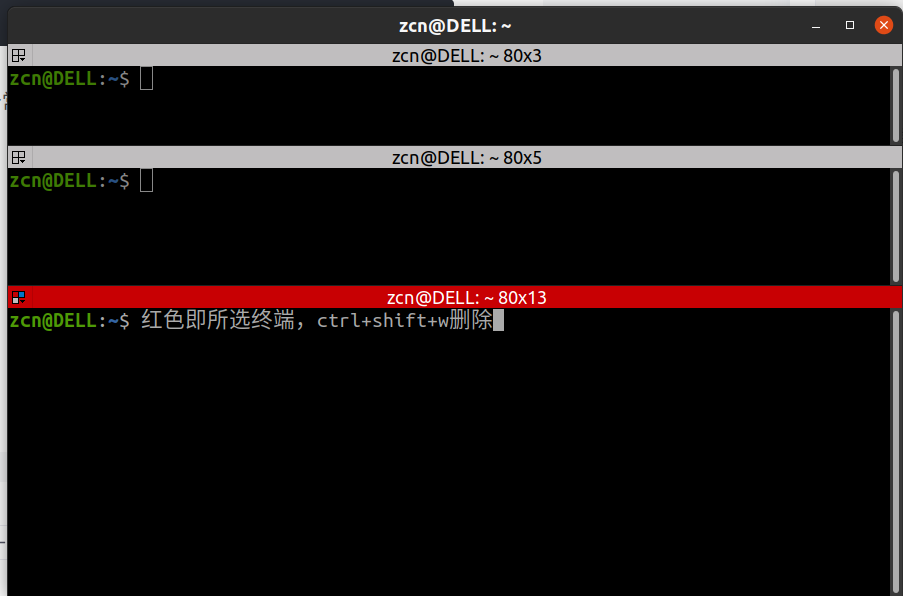
最后附赠超级终端安装教程:
sudo apt install terminator下载后再打开终端则是超级终端,下面是三个常用快捷键:
ctrl+shift+t #新建终端
ctrl+shift+o #在已有终端里新开一个终端
ctrl+shift+w #删除所选终端

社区规范:仅讨论OpenHarmony相关问题。
更多推荐
 14
14 0
0- 0



 已为社区贡献1条内容
已为社区贡献1条内容

所有评论(0)