工业平板不仅是显示:集成 RS485 与 CAN 总线的 HMI 硬件架构设计
接口,将控制与显示融为一体,让 HMI 不再仅仅是 PLC 的“传声筒”,而是成为了具备边缘计算和逻辑控制能力的“超级终端”。这不仅降低了自动化系统的整体成本,更为设备制造商提供了更高的软件附加值空间。在工厂能源管理或环境监控中,大量的电表、温控器使用 RS485 接口(Modbus-RTU 协议)。的工业平板方案,彻底改变了 HMI 的产品定义。在运动控制或工程车辆 HMI 中,CAN 总线是标
1. 行业痛点:HMI 的“空心化”与接口瓶颈
传统的基于 X86 或低端 ARM 的工业平板,通常仅具备 USB 和网口,面临以下应用痛点:
- 通讯依赖 PLC:无法直接读取 Modbus 仪表或 CANopen 伺服的数据,必须通过 PLC 转发,增加了延迟和编程复杂度。
- 接口扩展难:为了连接现场总线设备,需要外挂不稳定的 USB 转串口/CAN 模块,这在震动的工业现场是巨大的故障隐患。
- 实时性差:普通的安卓平板无法保证通讯的实时性,难以胜任逻辑控制任务。
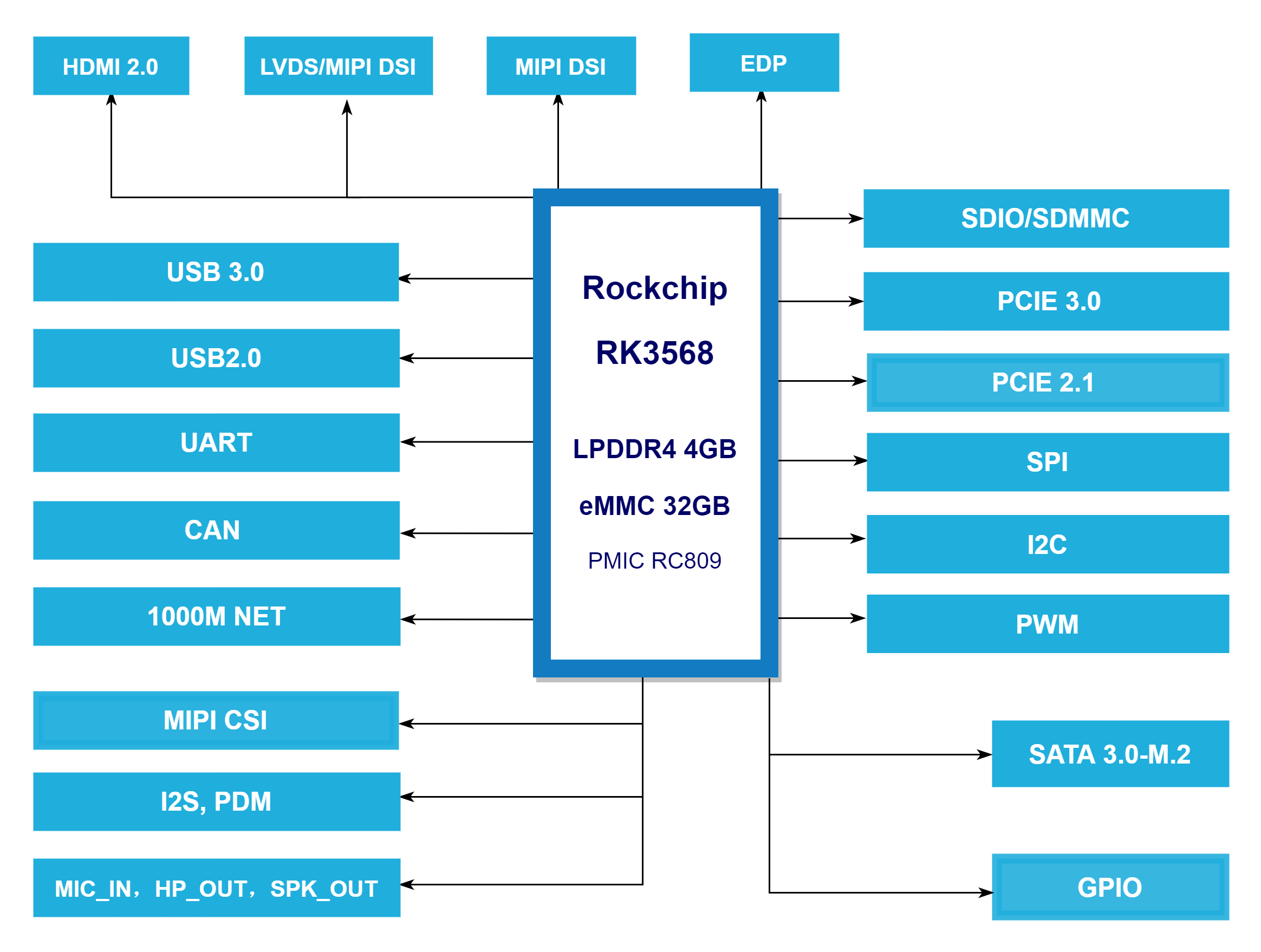
2. 核心选型:RK3568 —— 专为工业互联而生
根据电鱼智能产品手册,eFish-SBC-RK3568 是一款功能高度集成的嵌入式单板计算机,其接口配置完全是为工业现场量身定制的:
- 核心算力:搭载 Rockchip RK3568 四核 Cortex-A55 处理器,主频 2.0GHz 。配合 Mali-G52 GPU ,足以流畅运行 Qt、组态软件或 Android 工业 APP,处理复杂的人机交互逻辑。
- 原生总线支持:不同于消费级芯片,RK3568 在芯片层面就集成了 CAN 控制器和 UART,这意味着更低的中断延迟和更高的稳定性。
- 显示灵活性:支持 HDMI、LVDS、eDP 等多种显示接口,支持三屏同显或异显 ,可适配从 7 寸到 21 寸的各种工业液晶屏。
3. 架构设计:从“显示器”变身“控制器”
3.1 RS485 接口:Modbus 仪表的“大管家”
在工厂能源管理或环境监控中,大量的电表、温控器使用 RS485 接口(Modbus-RTU 协议)。
- 硬件资源:eFish-SBC-RK3568 板载 2 路 RS485 接口(包含在 6 路串口资源中)。
- 设计方案:
- 通道 1:作为 Modbus Master,轮询连接产线上的温湿度传感器、流量计和智能电表。
- 通道 2:作为 Modbus Slave,向上位机(SCADA)汇报汇总后的生产数据。
- 优势:直接利用板载接口,无需额外的串口服务器,减少了故障节点。
3.2 CAN 总线:伺服与车辆的“指挥官”
在运动控制或工程车辆 HMI 中,CAN 总线是标配。
- 硬件资源:核心板原生支持 2 路 CAN 接口 。
- 设计方案:
- 工业自动化:通过 CANopen 协议直接控制伺服驱动器或步进电机,实现 HMI 对机械臂或传送带的直接驱动,替代部分 PLC 功能。
- 工程车辆:连接车辆 ECU,读取 J1939 协议下的发动机转速、油温、故障码,实现车载仪表盘功能。
- 实时性:电鱼宣称其方案具备**“工业级实时解决方案,20微秒以下中断抖动延迟”** ,这对于 CAN 总线的高速数据收发至关重要。
3.3 网络与扩展:IT 与 OT 的桥梁
- 双千兆网口:板载 2 路 1000Mbps 以太网 。可实现内外网物理隔离(一路接工厂 MES,一路接现场相机),保障数据安全。
- 无线连接:支持 Wi-Fi 和 4G/5G 模块 ,确保移动设备(如 AGV 上的 HMI)始终在线。
4. 工业级可靠性:适应严苛现场
工业平板通常安装在控制柜门上,环境恶劣。
- 宽压电源:支持 DC 9~36V 电源输入 。直接适配工厂 24V 直流母线,能承受大型设备启停时的电压波动。
- 宽温运行:支持 -20°C 至 85°C 的工作温度 。无论是在东北的冷库还是南方的注塑车间,屏幕背后的主板都能稳定运行。
- 抗干扰:针对 RS485 和 CAN 这种长距离通讯接口,电鱼提供 EMC 抗干扰 和 ESD 防静电 的定制服务 ,防止工业现场的电磁噪声击穿芯片。
5. 总结
基于 电鱼 eFish-SBC-RK3568 的工业平板方案,彻底改变了 HMI 的产品定义。它利用 2 路 CAN 和 RS485 接口,将控制与显示融为一体,让 HMI 不再仅仅是 PLC 的“传声筒”,而是成为了具备边缘计算和逻辑控制能力的“超级终端”。这不仅降低了自动化系统的整体成本,更为设备制造商提供了更高的软件附加值空间。
关键参数速查:
- SOC: Rockchip RK3568 (四核 A55)
- 总线接口: 2x CAN, 2x RS485 (Total 6x UART)
- 显示接口: HDMI, LVDS, eDP (支持三屏)
- 输入电压: DC 9-36V
- 操作系统: Android / Linux / Ubuntu

社区规范:仅讨论OpenHarmony相关问题。
更多推荐
 12
12 0
0- 0



 已为社区贡献1条内容
已为社区贡献1条内容

所有评论(0)