openharmony多摄像头同时录像
1.介绍
文章主要介绍在openharmony上如何实现同时启动多个摄像头预览录像。
2.环境
oh版本:4.1 release
开发板:RK3568
2个USB摄像头
3.当前录像框架
如下图所示,录像时主要涉及应用,Camera Framework,Player Framework,Audio Framework和图形显示等几个部分。
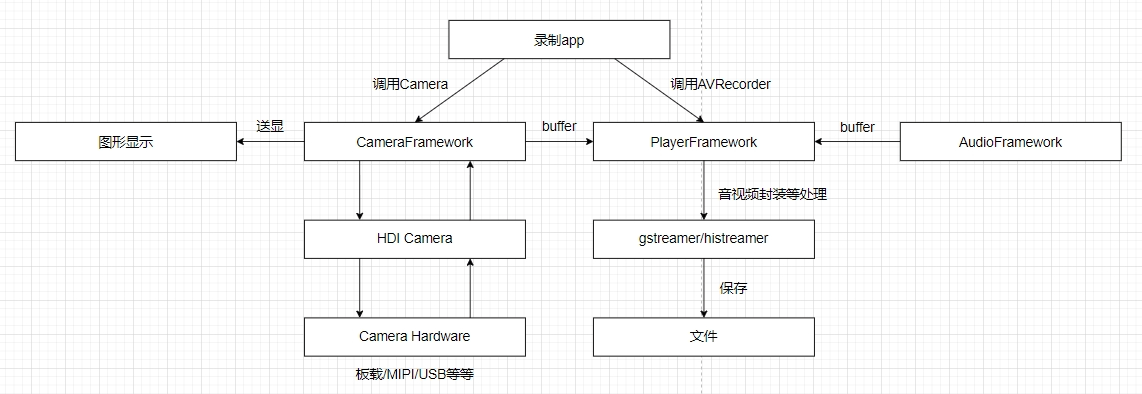
经过分析和测试,在camera hdi层,是已经支持同时启动多个实例录像的,问题主要阻塞在framework层。
4.framework流程分析
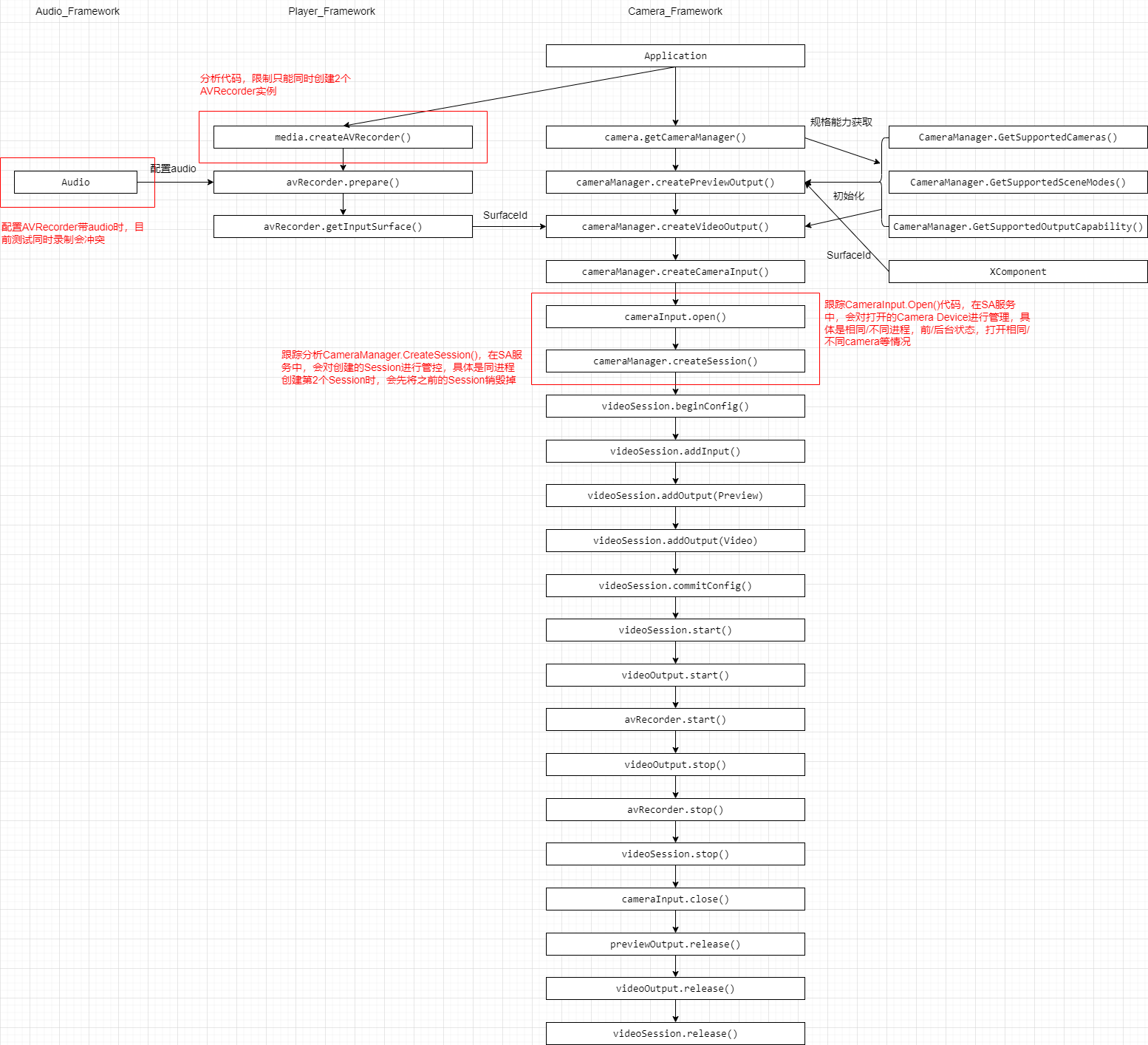
根据当前提供的api接口,录像的大致开发流程如下:
1.调用media接口创建CameraManager.
2.通过CameraManager来获取所有Camera设备.
3.用指定的Camera来获取支持的场景和Camera规格.
4.调用media接口创建AVRecorder,根据video和audio配置情况,调用prepare准备AVRecorder.
5.通过XComponent和AVRecorder分别获取预览和录像的SurfaceId.
6.通过CameraManager以获取的Camera规格等属性和SurfaceId来创建PreviewOutput,VideoOutput和CameraInput.
7.通过CameraInput打开设备.
8.通过CameraManager创建VideoSession,并调用BeginConfig开始配置Session.
9.将PreviewOutput,VideoOutput和CameraInput分别加入VideoSession.
10.调用VideoSession的CommitConfig提交配置.
11.分别调用VideoSession,VideoOutput,AVRecorder的start开始录像.
12.录像完成后,分别调用VideoOutput,AVRecorder,VideoSession的stop结束录像.
13.调用CameraInput的Close关闭设备.
14.释放创建的各种资源.
5.修改方案
根据上面流程调用的各个接口,分析框架代码,在启动摄像头录像时,类资源和实例都是单独创建,不互相依赖和影响,但是openharmony在录像时对系统资源占用做了限制,具体如下:
1.多路audio录制
2.多路AVRecorder实例
3.Camera device管控
4.Camera session管控
5.1.多audio录制问题
1.在AVRecorderNapi中,会检测是否有配置audio,来确定在录制时是否也启动audio的录制,在多摄像头同时录像的情况下,也会启动多个audio实例录音。RK3568目前采用的是多路实例单设备的方式。如果在其它的开发板上适配时不支持,可以在hap开发时,传参不设置 audioSourceType ,或是在 avrecorder_napi.cpp 文件的 GetSourceType 函数中将第一个 if 中的 getValue 在之前直接赋值为 false。
具体代码:
// foundation/multimedia/player_framework/frameworks/js/avrecorder/avrecorder_napi.cpp
int32_t AVRecorderNapi::GetSourceType(std::unique_ptr<AVRecorderAsyncContext> &asyncCtx, napi_env env, napi_value args)
{
std::shared_ptr<AVRecorderConfig> config = asyncCtx->config_;
int32_t audioSource = AUDIO_SOURCE_INVALID;
int32_t videoSource = VIDEO_SOURCE_BUTT;
bool getValue = false;
int32_t ret = AVRecorderNapi::GetPropertyInt32(env, args, "audioSourceType", audioSource, getValue);
CHECK_AND_RETURN_RET(ret == MSERR_OK,
(asyncCtx->AVRecorderSignError(ret, "getaudioSourceType", "audioSourceType"), ret));
// 不设置 audioSourceType 属性,或是在if判断前将 getValue设置为 false
if (getValue) {
config->audioSourceType = static_cast<AudioSourceType>(audioSource);
config->withAudio = true;
MEDIA_LOGI("audioSource Type %{public}d!", audioSource);
}
ret = AVRecorderNapi::GetPropertyInt32(env, args, "videoSourceType", videoSource, getValue);
CHECK_AND_RETURN_RET(ret == MSERR_OK,
(asyncCtx->AVRecorderSignError(ret, "getvideoSourceType", "videoSourceType"), ret));
if (getValue) {
config->videoSourceType = static_cast<VideoSourceType>(videoSource);
config->withVideo = true;
MEDIA_LOGI("videoSource Type %{public}d!", videoSource);
}
CHECK_AND_RETURN_RET(config->withAudio || config->withVideo,
(asyncCtx->AVRecorderSignError(MSERR_INVALID_VAL, "getsourcetype", "SourceType"), MSERR_INVALID_VAL));
return MSERR_OK;
}
5.2.多AVRecorder实例问题
在media_server_manager.cpp中,在创建Recorder实例时,在SA服务端,目前限制的实例数 recorderMax 是 2 个,如果有更多需求可以修改 recorderMax 的数量。
// foundation/multimedia/player_framework/services/services/sa_media/server/media_server_manager.cpp
sptr<IRemoteObject> MediaServerManager::CreateRecorderStubObject()
{
// 限制录像实例个数为2,可根据需要增大
constexpr uint32_t recorderMax = 2;
CHECK_AND_RETURN_RET_LOG(recorderStubMap_.size() < recorderMax,
nullptr, "The number of recorder services(%{public}zu) has reached the upper limit."
"Please release the applied resources.", recorderStubMap_.size());
sptr<RecorderServiceStub> recorderStub = RecorderServiceStub::Create();
CHECK_AND_RETURN_RET_LOG(recorderStub != nullptr, nullptr, "failed to create RecorderServiceStub");
sptr<IRemoteObject> object = recorderStub->AsObject();
CHECK_AND_RETURN_RET_LOG(object != nullptr, nullptr, "failed to create RecorderServiceStub");
pid_t pid = IPCSkeleton::GetCallingPid();
recorderStubMap_[object] = pid;
Dumper dumper;
dumper.entry_ = [recorder = recorderStub](int32_t fd) -> int32_t {
return recorder->DumpInfo(fd);
};
dumper.pid_ = pid;
dumper.uid_ = IPCSkeleton::GetCallingUid();
dumper.remoteObject_ = object;
dumperTbl_[StubType::RECORDER].emplace_back(dumper);
MEDIA_LOGD("The number of recorder services(%{public}zu) pid(%{public}d).",
recorderStubMap_.size(), pid);
(void)Dump(-1, std::vector<std::u16string>());
return object;
}
5.3.Camera device管控问题
在hcamera_device.cpp文件的 OpenDevice 函数中,会判断是否可以打开camera,调用流程:OpenDevice()->CanOpenCamera()->GetConflictDevices(),在hcamera_device_manager.cpp的函数 GetConflictDevices 会检测已打开的Camera device,对相同/不同进程,前/后台状态,打开相同/不同camera等情况关闭之前已打开的Camera device。这里可以直接去掉 CanOpenCamera 的调用,来取消管控限制。
// foundation/multimedia/camera_framework/services/camera_service/src/hcamera_device.cpp
int32_t HCameraDevice::OpenDevice()
{
MEDIA_DEBUG_LOG("HCameraDevice::OpenDevice start");
CAMERA_SYNC_TRACE;
int32_t errorCode;
MEDIA_INFO_LOG("HCameraDevice::OpenDevice Opening camera device: %{public}s", cameraID_.c_str());
// 注释 CanOpenCamera() 调用,取消限制
// bool canOpenDevice = CanOpenCamera();
// if (!canOpenDevice) {
// MEDIA_ERR_LOG("refuse to turning on the camera");
// return CAMERA_DEVICE_CONFLICT;
// }
errorCode = cameraHostManager_->OpenCameraDevice(cameraID_, this, hdiCameraDevice_);
if (errorCode != CAMERA_OK) {
MEDIA_ERR_LOG("HCameraDevice::OpenDevice Failed to open camera");
} else {
isOpenedCameraDevice_.store(true);
HCameraDeviceManager::GetInstance()->AddDevice(IPCSkeleton::GetCallingPid(), this);
}
errorCode = InitStreamOperator();
if (errorCode != CAMERA_OK) {
MEDIA_ERR_LOG("HCameraDevice::OpenDevice InitStreamOperator fail err code is:%{public}d", errorCode);
}
..........
}
bool HCameraDevice::CanOpenCamera()
{
sptr<HCameraDevice> cameraNeedEvict;
bool ret = HCameraDeviceManager::GetInstance()->GetConflictDevices(cameraNeedEvict, this);
if (cameraNeedEvict != nullptr) {
MEDIA_DEBUG_LOG("HCameraDevice::CanOpenCamera open current device need to close other devices");
cameraNeedEvict->OnError(DEVICE_PREEMPT, 0);
cameraNeedEvict->CloseDevice();
}
return ret;
}
// foundation/multimedia/camera_framework/services/camera_service/src/hcamera_device_manager.cpp
// 在 GetConflictDevices 函数中,进行各种判断来关闭之前打开的 camera device
bool HCameraDeviceManager::GetConflictDevices(sptr<HCameraDevice> &cameraNeedEvict,
sptr<HCameraDevice> cameraIdRequestOpen)
{
ADD_TAG();
pid_t activeClient = GetActiveClient();
pid_t pidOfOpenRequest = IPCSkeleton::GetCallingPid();
if (stateOfACamera_.Size() != 0) {
if (activeClient != -1) {
MEDIA_ERR_LOG("HCameraDeviceManager::GetConflictDevices A and OH camera is turning on in the same time");
return false;
}
return isAllowOpen(pidOfOpenRequest);
} else {
MEDIA_INFO_LOG("HCameraDeviceManager::GetConflictDevices no A camera active");
}
if (activeClient == -1) {
return true;
}
sptr<HCameraDevice> activeCamera = GetCameraByPid(activeClient);
if (activeCamera == nullptr) {
return true;
}
int32_t priorityOfOpenRequestPid = 1001;
int32_t result = Memory::MemMgrClient::GetInstance().
GetReclaimPriorityByPid(pidOfOpenRequest, priorityOfOpenRequestPid);
MEDIA_INFO_LOG("HCameraDeviceManager::GetConflictDevices callerPid:%{public}d, priority score: %{public}d",
pidOfOpenRequest, priorityOfOpenRequestPid);
if (!result) {
if (activeClient == pidOfOpenRequest) {
MEDIA_INFO_LOG("HCameraDeviceManager::GetConflictDevices is same pid");
if (!activeCamera->GetCameraId().compare(cameraIdRequestOpen->GetCameraId())) {
cameraNeedEvict = activeCamera;
MEDIA_INFO_LOG("HCameraDeviceManager::GetConflictDevices is same pid, return ture");
return true;
} else {
MEDIA_INFO_LOG("HCameraDeviceManager::GetConflictDevices is same pid, return false");
return false;
}
}
int32_t priorityOfIterPid = 1001;
int32_t iterResult = Memory::MemMgrClient::GetInstance().
GetReclaimPriorityByPid(activeClient, priorityOfIterPid);
MEDIA_INFO_LOG("HCameraDeviceManager::canOpenCamera pid:%{public}d, priority score: %{public}d",
activeClient, priorityOfIterPid);
if (!iterResult && priorityOfOpenRequestPid <= priorityOfIterPid) {
cameraNeedEvict= activeCamera;
return true;
} else {
return false;
}
} else {
MEDIA_ERR_LOG("HCameraDeviceManager::GetConflictDevices falied to get priority");
return false;
}
}
5.4.Camera session管控问题
在hcapture_session.cpp中创建 HCaptureSession 实例时,会检测当前调用进程是否已有创建Session实例,会将已创建的实例关闭.
// foundation/multimedia/camera_framework/services/camera_service/src/hcapture_session.cpp
HCaptureSession::HCaptureSession(const uint32_t callingTokenId, int32_t opMode)
{
pid_ = IPCSkeleton::GetCallingPid();
uid_ = IPCSkeleton::GetCallingUid();
MEDIA_DEBUG_LOG("HCaptureSession: camera stub services(%{public}zu) pid(%{public}d).", TotalSessionSize(), pid_);
auto pidSession = TotalSessionsGet(pid_); // 获取当前进程已经创建的 session 实例
if (pidSession != nullptr) {
auto disconnectDevice = pidSession->GetCameraDevice();
if (disconnectDevice != nullptr) {
disconnectDevice->OnError(HDI::Camera::V1_0::DEVICE_PREEMPT, 0);
}
MEDIA_ERR_LOG("HCaptureSession::HCaptureSession doesn't support multiple sessions per pid");
pidSession->Release(); // 关闭释放当前进程已经创建的 session 实例
}
TotalSessionsInsert(pid_, this);
callerToken_ = callingTokenId;
opMode_ = opMode;
SetOpMode(opMode_);
MEDIA_INFO_LOG(
"HCaptureSession: camera stub services(%{public}zu). opMode_= %{public}d", TotalSessionSize(), opMode_);
}
在修改限制时,要注意 session 的释放问题,具体修改如下:
修改 g_totalSessions 的类型,由之前 static std::map<pid_t, sptr<HCaptureSession>> g_totalSessions; 改为 static std::map<pid_t, std::vector<sptr<HCaptureSession>>> g_totalSessions; ,由一对一改为一对多,同时将增,删,获取方式等也同步做修改。
// foundation/multimedia/camera_framework/services/camera_service/src/hcapture_session.cpp
static std::map<pid_t, std::vector<sptr<HCaptureSession>>> g_totalSessions;
static std::mutex g_totalSessionLock;
static size_t TotalSessionSize()
{
std::lock_guard<std::mutex> lock(g_totalSessionLock);
int size = 0;
for (auto &pair : g_totalSessions) {
size += pair.second.size();
}
return size;
}
static const std::map<pid_t, std::vector<sptr<HCaptureSession>>> TotalSessionsCopy()
{
std::lock_guard<std::mutex> lock(g_totalSessionLock);
return g_totalSessions;
}
static void TotalSessionsInsert(pid_t pid, sptr<HCaptureSession> session)
{
std::lock_guard<std::mutex> lock(g_totalSessionLock);
auto it = g_totalSessions.find(pid);
if (it != g_totalSessions.end()) {
MEDIA_INFO_LOG("HCaptureSession TotalSessionsInsert insert session, pid already exist! pid is:%{public}d", pid);
it->second.push_back(session);
return;
}
g_totalSessions[pid] = {session};
}
static std::vector<sptr<HCaptureSession>> TotalSessionsGet(pid_t pid)
{
std::lock_guard<std::mutex> lock(g_totalSessionLock);
auto it = g_totalSessions.find(pid);
if (it != g_totalSessions.end()) {
return it->second;
}
return {};
}
static void TotalSessionErase(pid_t pid, const HCaptureSession* ptr)
{
std::lock_guard<std::mutex> lock(g_totalSessionLock);
if (g_totalSessions.count(pid) != 0) {
auto it = g_totalSessions[pid].begin();
for (; it != g_totalSessions[pid].end(); ++it) {
if (it->GetRefPtr() == ptr) {
g_totalSessions[pid].erase(it);
break;
}
}
if (g_totalSessions[pid].empty()) {
g_totalSessions.erase(pid);
}
}
}
在 HCaptureSession::HCaptureSession 构造函数里去掉限制。
// foundation/multimedia/camera_framework/services/camera_service/src/hcapture_session.cpp
HCaptureSession::HCaptureSession(const uint32_t callingTokenId, int32_t opMode)
{
pid_ = IPCSkeleton::GetCallingPid();
uid_ = IPCSkeleton::GetCallingUid();
MEDIA_DEBUG_LOG("HCaptureSession: camera stub services(%{public}zu) pid(%{public}d).", TotalSessionSize(), pid_);
// auto pidSession = TotalSessionsGet(pid_);
// if (pidSession != nullptr) {
// auto disconnectDevice = pidSession->GetCameraDevice();
// if (disconnectDevice != nullptr) {
// disconnectDevice->OnError(HDI::Camera::V1_0::DEVICE_PREEMPT, 0);
// }
// MEDIA_ERR_LOG("HCaptureSession::HCaptureSession doesn't support multiple sessions per pid");
// pidSession->Release();
// }
TotalSessionsInsert(pid_, this);
callerToken_ = callingTokenId;
opMode_ = opMode;
SetOpMode(opMode_);
MEDIA_INFO_LOG(
"HCaptureSession: camera stub services(%{public}zu). opMode_= %{public}d", TotalSessionSize(), opMode_);
}
在 HCaptureSession::Release 中将实例从 map 中删除,减少引用计数,确保资源正确释放。
// foundation/multimedia/camera_framework/services/camera_service/src/hcapture_session.cpp
int32_t HCaptureSession::Release(CaptureSessionReleaseType type)
{
CAMERA_SYNC_TRACE;
int32_t errorCode = CAMERA_OK;
stateMachine_.StateGuard([&errorCode, this, type](CaptureSessionState currentState) {
MEDIA_INFO_LOG("HCaptureSession::Release pid(%{public}d). release type is:%{public}d", pid_, type);
bool isTransferSupport = stateMachine_.CheckTransfer(CaptureSessionState::SESSION_RELEASED);
if (!isTransferSupport) {
MEDIA_ERR_LOG("HCaptureSession::Release error, this session is already released!");
errorCode = CAMERA_INVALID_STATE;
return;
}
// Clear outputs
ReleaseStreams();
// Clear inputs
auto cameraDevice = GetCameraDevice();
if (cameraDevice != nullptr) {
cameraDevice->Release();
POWERMGR_SYSEVENT_CAMERA_DISCONNECT(cameraDevice->GetCameraId().c_str());
SetCameraDevice(nullptr);
}
StopUsingPermissionCallback(callerToken_, OHOS_PERMISSION_CAMERA);
UnregisterPermissionCallback(callerToken_);
// Clear current session
MEDIA_DEBUG_LOG(
"ClearCaptureSession: camera stub services(%{public}zu) pid(%{public}d).", TotalSessionSize(), pid_);
TotalSessionErase(pid_, this); // 移除当前 session,减少引用计数
MEDIA_DEBUG_LOG("ClearCaptureSession: camera stub services(%{public}zu).", TotalSessionSize());
sptr<ICaptureSessionCallback> emptyCallback = nullptr;
SetCallback(emptyCallback);
stateMachine_.Transfer(CaptureSessionState::SESSION_RELEASED);
isSessionStarted_ = false;
});
return errorCode;
}
在 HCaptureSession::DestroyStubObjectForPid 中,退出进程时,将对应所有打开 session 实例都释放。
// foundation/multimedia/camera_framework/services/camera_service/src/hcapture_session.cpp
void HCaptureSession::DestroyStubObjectForPid(pid_t pid)
{
MEDIA_DEBUG_LOG("camera stub services(%{public}zu) pid(%{public}d).", TotalSessionSize(), pid);
// 一对一改为一对多之后,需要依次调用。
std::vector<sptr<HCaptureSession>> sessions = TotalSessionsGet(pid);
// std::string info;
for (auto &session : sessions) {
session->Release(CaptureSessionReleaseType::RELEASE_TYPE_CLIENT_DIED);
}
MEDIA_DEBUG_LOG("camera stub services(%{public}zu).", TotalSessionSize());
}
在 HCaptureSession::dumpSessions 中,dump出所有 session 信息。
// foundation/multimedia/camera_framework/services/camera_service/src/hcapture_session.cpp
void HCaptureSession::dumpSessions(std::string& dumpString)
{
auto totalSession = TotalSessionsCopy();
for (auto &pair : totalSession) {
// 一对一改为一对多之后,需要依次调用。
for (auto &session : pair.second) {
dumpString += "No. of sessions for client:[" + std::to_string(1) + "]:\n";
session->dumpSessionInfo(dumpString);
}
}
}
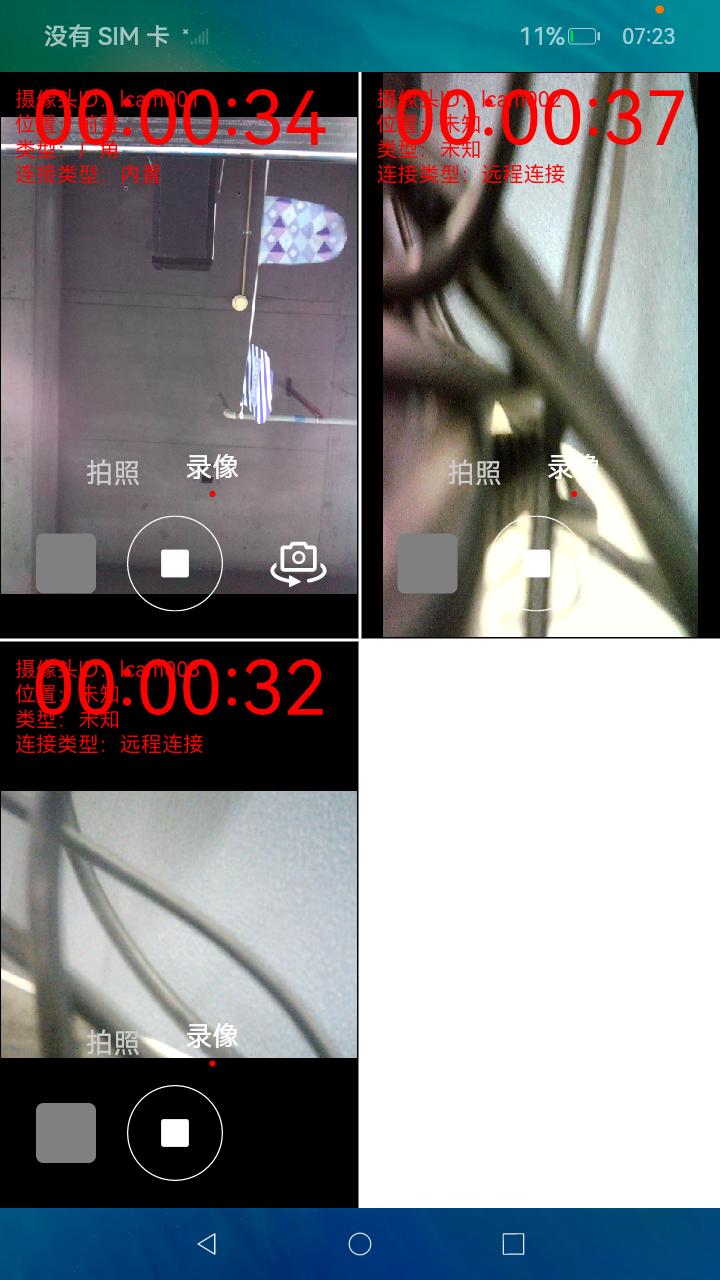
上面所有修改完成后,编译完重烧镜像,效果如下:
6.注意事项
1.在社区openharmony 4.1release上,RK3568已经适配好USB Camera,可以即插即用,无须另外再适配USB Camera。
2.如果是要接入多个USB Camera,需要注意:目前基本都是使用linux中提供的usb camera驱动,但是usb bus的 bandwidth 是有限的,如果将多个USB Camera接入一路usb bus,后打开的camera就会出现 No space left on device 的错误,网络上有比较多的解决方法,可以参考下。

社区规范:仅讨论OpenHarmony相关问题。
更多推荐
 6
6 5
5- 0



 已为社区贡献6条内容
已为社区贡献6条内容

所有评论(0)